
Biorobotics Laboratory BioRob
Pascal Cominoli: Development of a physical simulation of a real humanoid robot

The goal of this diploma project was the development of a physical simulation of the Fujitsu HOAP-2 robot.
The Swiss Federal Institute of Technology purchased one HOAP-2 during the summer 2004. So it was really important to develop a simulator for this robot. Performing tests on the real robot could damage it, depending on the kinds of things one is doing. And knowing the price of such a robot, one could really easily understand that a simulator is necessary. The real robot needs to be handled carefully, calibrations need to be done. There is no such issues on a simulated robot. If one performs a mistake with a simulated robot, just reload the simulation, and everything is fine. There is no calibrations, no problems of simultaneous access to one robot shared by many people. It also allows someone not having access to a robot, like a stand alone student or small universities, to perform good simulations.
This simulator will be used for performing for example walking controllers, or various manipulations, that could be dangerous or hazardous if they were performed first on the real robot. After a validated test on the simulator meaning that the real robot will not suffer any harm, the user could then upload its controller on the real robot. The simulator could also be used to do genetics evolution much faster than on the real robot. On a good computer, simulation can run up to ten times real time, what is unrealizable on a real robot.
-
tpd_report.pdf
Full report (PDF)
cominoli_slides_TPD.zip Presentation slides and movies (35 Mo)
Cominoli_TPD_slides.zip Presentation slides without movies (10 Mo)
webots_HOAP2.tar.gz HOAP-2 worlds for Webots
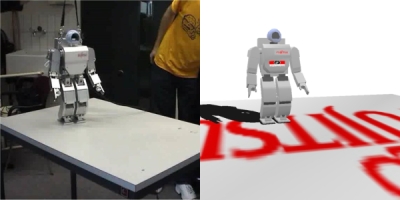
HOAP-2 first walk
-
walk_m01.avi
Real HOAP-2 performing a simple and slow walk
walk_m01.mpg Real HOAP-2 performing a simple and slow walk [Mpeg-1, 3.4MB]
walk_m01_simu.avi Simulation best result
walk_m01_simu.mpg Simulation best result [Mpeg-1, 2.9MB]
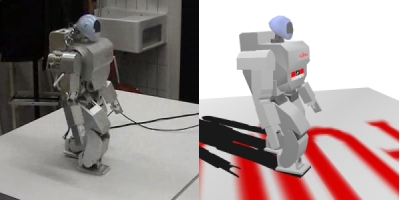
HOAP-2 second walk
-
walk_cpg5.avi
Real HOAP-2 performing a faster walk
walk_cpg5.mpg Real HOAP-2 performing a faster walk [Mpeg-1, 4.0MB]
walk_cpg.avi Simulation best result
walk_cpg.mpg Simulation best result [Mpeg-1, 3.0MB]
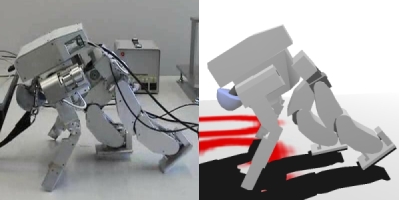
HOAP-2 standing up after lying on its elbows
-
stand_up_belly.avi
Real HOAP-2 standing up after lying on its elbows
stand_up_belly.mpg Real HOAP-2 standing up after lying on its elbows [Mpeg-1, 1.7MB]
belly_upSimu.mpeg Simulation best result
belly_upSimu_divx.avi Simulation best result [DivX, 630KB]
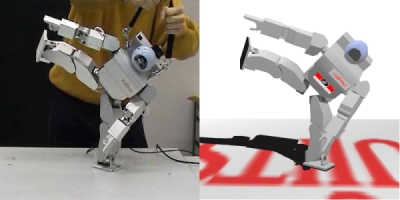
HOAP-2 standing up after lying on its back

-
stand_up_back.avi
Real HOAP-2 standing up after lying on its back
stand_up_back.mpg Real HOAP-2 standing up after lying on its back [Mpeg-1, 1.6MB]
back_up.mpeg Simulation best result
back_up_divx.avi Simulation best result [DivX, 810KB]
HOAP-2 performing sumo moves
-
sumo_siko.avi
Real HOAP-2 performing smooth sumo moves
sumo_siko.mpg Real HOAP-2 performing smooth sumo moves [Mpeg-1, 6.0MB]
sumo.avi Simulation best result
sumo.mpg Simulation best result [Mpeg-1, 5.3MB]
Movies postures (statical tests)

-
movies_postures_HOAP2.tar.gz
Movies of the 16 tests performed for the postures protocol
postures_protocol_motions.tar.gz CSV (position) files for each test
- Archived student projects
- Alain Dysli
- Alexandre Tuleu
- Anurag Tripathi
- Ariane Pasquier
- Aïsha Hitz
- Barthélémy von Haller
- Benjamin Fankhauser
- Benoit Rat
- Bertrand Mesot
- Biljana Petreska
- Brian Jimenez
- Christian Lathion
- Christophe Richon
- Cédric Favre
- Daisy Lachat
- Daniel Marbach
- Daniel Marbach
- Elia Palme
- Elmar Dittrich
- Etienne Dysli
- Fabrizio Patuzzo
- Fritz Menzer
- Giorgio Brambilla
- Ivan Kviatkevitch
- Jean-Christophe Fillion-Robin
- Jean-Philippe Egger
- Jennifer Meinen
- Jesse van den Kieboom
- Jocelyne Lotfi
- Julia Jesse
- Julien Gagnet
- Julien Nicolas
- Julien Ruffin
- Jérôme Braure
- Jérôme Guerra
- Jérôme Maye
- Jérôme Maye
- Kevin Drapel & Cyril Jaquier
- Kevin Drapel & Cyril Jaquier
- Loïc Matthey
- Ludovic Righetti
- Lukas Benda
- Lukas Hohl
- Lukas Hohl
- Marc-Antoine Nüssli
- Martin Biehl
- Martin Riess
- Martin Rumo
- Mathieu Salzmann
- Matteo Thomas de Giacomi
- Matteo Thomas de Giacomi
- Michael Gerber
- Michel Ganguin
- Michel Yerly
- Mikaël Mayer
- Muhamed Mehmedinovic
- Neha Priyadarshini Garg
- Nicolas Delieutraz
- Panteleimon Zotos
- Pascal Cominoli
- Pascal Cominoli
- Patrick Amstutz
- Pedro Lopez Estepa
- Pierre-Arnaud Guyot
- Rafael Arco Arredondo
- Raphaël Haberer-Proust
- Rico Möckel
- Sacha Contantinescu
- Sandra Wieser
- Sarah Marthe
- Simon Blanchoud
- Simon Capern
- Simon Lépine
- Simon Ruffieux
- Simon Rutishauser
- Stephan Singh
- Stéphane Mojon
- Stéphane Mojon
- Sébastian Gay
- Vlad Trifa
- Yvan Bourquin