
Biorobotics Laboratory BioRob
Adding Vision To Snake Robot
Benoit Rat - Semester Project 2006-2007
Supervisor: Dr. Francois Fleuret, CVLAB
Collaborators: Prof. Auke Jan Ijspeert - Alessandro Crespi.
Benoit Rat - Semester Project 2006-2007
Supervisor: Dr. Francois Fleuret, CVLAB
Collaborators: Prof. Auke Jan Ijspeert - Alessandro Crespi.
Abstract
The Adding Vision to Snake Robot project is focused on designing algorithms for stimulus tracking and obstacle avoidance for the robot moving in cluttered environments. The algorithms needed to be tested on the real robot in engineered environments of increasing complexity.
This project focus on primary level of artificial vision such as color segmentation. A robust algorithm for color based tracking supporting changes of illumination is implemented. By using this algorithm the robot is able to follow a pink ball in real-time generating specific stimuli.
A more complex artificial vision process has also been developed during the resarch phase. This second algorithm finds the geometrical transformation between two consecutive frames and thus deduces the relative position of our robot.
Documents
Report of the project (PDF, 6.4 MB)
Slides of the presentation (PDF, 570 KB)
Videos of Color Tracking
 Offline (627 KB) |
 Inside view (3.9 MB) |
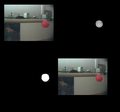
| An offline video of the color tracking algorithm. The four screens represent respectively: the input frame, the probability map, the mask, the output result. | Online color tracking with view from the robot. This video does not correspond to the "top view" videos but is really similar |
 Top View 1 (6.1 MB) |
 Top View 2 (843KB) |
Screenshots of Matching Patch Algorithm
Two different screenshots of the Matching Patch Algorithm: (For more informations look at the presentation or the report)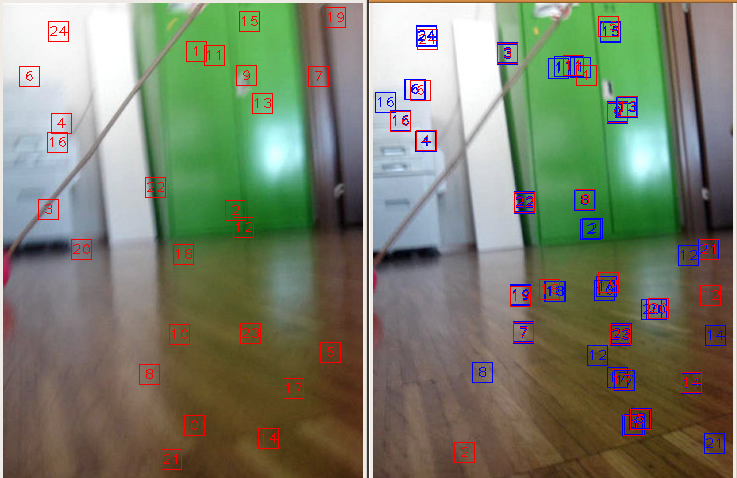
![]()
Links
This project was supervised by François Fleuret from the CVLAB (Computer Vision Lab)
The source code was developped using: OpenCV Library
- Archived student projects
- Alain Dysli
- Alexandre Tuleu
- Anurag Tripathi
- Ariane Pasquier
- Aïsha Hitz
- Barthélémy von Haller
- Benjamin Fankhauser
- Benoit Rat
- Bertrand Mesot
- Biljana Petreska
- Brian Jimenez
- Christian Lathion
- Christophe Richon
- Cédric Favre
- Daisy Lachat
- Daniel Marbach
- Daniel Marbach
- Elia Palme
- Elmar Dittrich
- Etienne Dysli
- Fabrizio Patuzzo
- Fritz Menzer
- Giorgio Brambilla
- Ivan Kviatkevitch
- Jean-Christophe Fillion-Robin
- Jean-Philippe Egger
- Jennifer Meinen
- Jesse van den Kieboom
- Jocelyne Lotfi
- Julia Jesse
- Julien Gagnet
- Julien Nicolas
- Julien Ruffin
- Jérôme Braure
- Jérôme Guerra
- Jérôme Maye
- Jérôme Maye
- Kevin Drapel & Cyril Jaquier
- Kevin Drapel & Cyril Jaquier
- Loïc Matthey
- Ludovic Righetti
- Lukas Benda
- Lukas Hohl
- Lukas Hohl
- Marc-Antoine Nüssli
- Martin Biehl
- Martin Riess
- Martin Rumo
- Mathieu Salzmann
- Matteo Thomas de Giacomi
- Matteo Thomas de Giacomi
- Michael Gerber
- Michel Ganguin
- Michel Yerly
- Mikaël Mayer
- Muhamed Mehmedinovic
- Neha Priyadarshini Garg
- Nicolas Delieutraz
- Panteleimon Zotos
- Pascal Cominoli
- Pascal Cominoli
- Patrick Amstutz
- Pedro Lopez Estepa
- Pierre-Arnaud Guyot
- Rafael Arco Arredondo
- Raphaël Haberer-Proust
- Rico Möckel
- Sacha Contantinescu
- Sandra Wieser
- Sarah Marthe
- Simon Blanchoud
- Simon Capern
- Simon Lépine
- Simon Ruffieux
- Simon Rutishauser
- Stephan Singh
- Stéphane Mojon
- Stéphane Mojon
- Sébastian Gay
- Vlad Trifa
- Yvan Bourquin