
Biorobotics Laboratory BioRob
Underwater Optical Communication
Underwater Optical Communication
Pedro López Estepa - Semester Project 2008-2000
Supervisor: Prof. Auke jan Ijspeert
Assistant: Kostantinos Karakasiliotis
Supervisor: Prof. Auke jan Ijspeert
Assistant: Kostantinos Karakasiliotis
Abstract
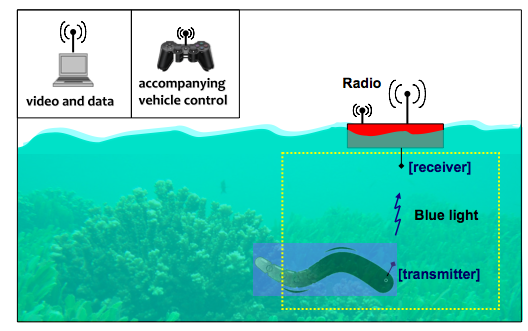
This project aims at implementing an underwater optical communication system between a robot and a surface platform for video transmission.
Firstly we present the fundamental physics of different waves; then we discuss and compare the pros and cons for adopting different communication carriers (acoustic,radio and optical) and the final choice in optical communication. To establish an underwater communication system we develop an optical system, combining the Manchester modulation with 3 Watt high power light emitting diode, emitting light in blue part of visible spectrum. This report shows the design and experimental results in air and underwater.
Modules
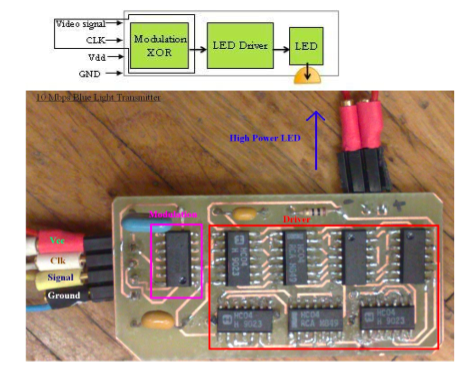
Transmitter
The main problem, in an optical transmitter design, is the upper frequency at which the light source can be modulated. Several factors limit it, these include the time constants (frequency response) of the driving circuitry, the physics of the diode itself, and the characteristics of the medium. All these factors must be solved through a summary between modulation, driving and light source. The final transmitter design for an underwater optical communication is below.
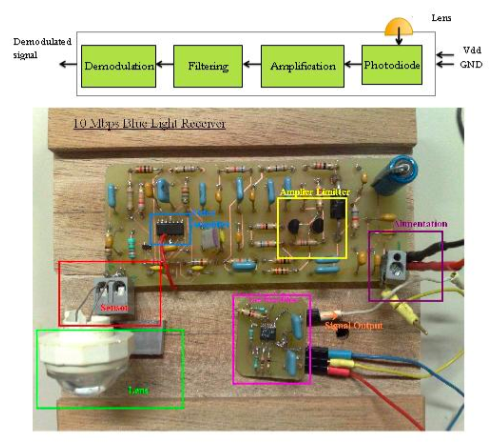
Receiver
The receiver detects the light via the photo detector. The low current signal triggers a dual gate transistor (NTE415), which takes the current from the 12 V rail and transmits it to the NE592 video amplifier. The NE592 cleans the incoming rounded signal to a square wave. Pin 8 of the NE592 is the other part of the differential output and carries the data stream through a pre-amp circuit consisting of a pair of common emitter connected transistor. The signal is then sent to a 4th Butterworth low pass filter (LT1568IGN) and a high frequency amplifier.
Documments
- Archived student projects
- Alain Dysli
- Alexandre Tuleu
- Anurag Tripathi
- Ariane Pasquier
- Aïsha Hitz
- Barthélémy von Haller
- Benjamin Fankhauser
- Benoit Rat
- Bertrand Mesot
- Biljana Petreska
- Brian Jimenez
- Christian Lathion
- Christophe Richon
- Cédric Favre
- Daisy Lachat
- Daniel Marbach
- Daniel Marbach
- Elia Palme
- Elmar Dittrich
- Etienne Dysli
- Fabrizio Patuzzo
- Fritz Menzer
- Giorgio Brambilla
- Ivan Kviatkevitch
- Jean-Christophe Fillion-Robin
- Jean-Philippe Egger
- Jennifer Meinen
- Jesse van den Kieboom
- Jocelyne Lotfi
- Julia Jesse
- Julien Gagnet
- Julien Nicolas
- Julien Ruffin
- Jérôme Braure
- Jérôme Guerra
- Jérôme Maye
- Jérôme Maye
- Kevin Drapel & Cyril Jaquier
- Kevin Drapel & Cyril Jaquier
- Loïc Matthey
- Ludovic Righetti
- Lukas Benda
- Lukas Hohl
- Lukas Hohl
- Marc-Antoine Nüssli
- Martin Biehl
- Martin Riess
- Martin Rumo
- Mathieu Salzmann
- Matteo Thomas de Giacomi
- Matteo Thomas de Giacomi
- Michael Gerber
- Michel Ganguin
- Michel Yerly
- Mikaël Mayer
- Muhamed Mehmedinovic
- Neha Priyadarshini Garg
- Nicolas Delieutraz
- Panteleimon Zotos
- Pascal Cominoli
- Pascal Cominoli
- Patrick Amstutz
- Pedro Lopez Estepa
- Pierre-Arnaud Guyot
- Rafael Arco Arredondo
- Raphaël Haberer-Proust
- Rico Möckel
- Sacha Contantinescu
- Sandra Wieser
- Sarah Marthe
- Simon Blanchoud
- Simon Capern
- Simon Lépine
- Simon Ruffieux
- Simon Rutishauser
- Stephan Singh
- Stéphane Mojon
- Stéphane Mojon
- Sébastian Gay
- Vlad Trifa
- Yvan Bourquin