
Biorobotics Laboratory BioRob
Neubot Project: Framework for the Simulations of Modular Robots and Self-Organisation of Locomotion under Water
Abstract
The Biologically Inspired Robotics Group (BIRG) of the Swiss Federal Institute of Technology in Lausanne (EPFL) in collaboration with the Automated System Laboratory (ASL) of the EPFL is currently developing new hardware and software for an experimental modular robotic platform. Modular robots are robots built of several building blocks called modules. Usually modules are all similar, but this assertion is not yet true in this new project as the implies: Neubot i.e. Von Neumann Robot. Like the von Neumann automata was made up of 28 differents modules, the Neubot Project plan to develop several types of modules, each with its own abilities and capacities. When several modules are put together, efficient locomotion can be accomplished. This study describes the framework developped to simplify the physics simulations of modular robots, and in a second part this study will explore the self-organisation of underwater locomotion using the Central Pattern Generator (CPG) inspired from the nervous system of vertebrates and the co-evolution of the brain and the body to create entirely new shape adapted to the Neubot modules.
report.pdf The report
tpd.ppt The powerpoint presentation (without movie)
presentation.zip The powerpoint presentation (with movies)
tpd.pdf The presentation (pdf)
Movies
The videos which follow are encoded in AVI or MPEG4. They are easily viewable with standard softwares. However, on macintosh, QuickTime functions neither for one nor for the other and I advise you to download free software VLC. It is multi-platform and can be used on any operating system if you have problems to view films.
Arrow
 This robot has a predefined structure (defined manually) and a controller based on neural networks oscillators coupled using synaptic spreading. Due to the many modules of this robot the simulation cannot display it at real velocity. The speed is divided by two.
This robot has a predefined structure (defined manually) and a controller based on neural networks oscillators coupled using synaptic spreading. Due to the many modules of this robot the simulation cannot display it at real velocity. The speed is divided by two.
-
fleche(ff2)c.avi
(5.4Mo)
fleche(ff2)c.mpg (Mpeg-1, 4.5Mo)
fleche1.mpeg (5.2Mo)
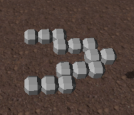
Snake
 This robot has a predefined structure (defined manually) and a controller based on neural networks oscillators coupled using synaptic spreading. Due to the many modules of this robot the simulation cannot display it at real velocity. The speed of the movie is 3/4 of the real speed.
This robot has a predefined structure (defined manually) and a controller based on neural networks oscillators coupled using synaptic spreading. Due to the many modules of this robot the simulation cannot display it at real velocity. The speed of the movie is 3/4 of the real speed.
-
snake1.mpeg
(5.5Mo)
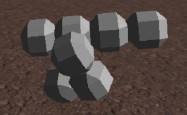
Tetrapode
 This robot has a predefined structure (defined manually) and a controller based on neural networks oscillators coupled using synaptic spreading. The robot in the movie has shorter legs than on the picture because too many modules slow too much the simulation and thus the movie. Here the speed is 1/2 the real one.
This robot has a predefined structure (defined manually) and a controller based on neural networks oscillators coupled using synaptic spreading. The robot in the movie has shorter legs than on the picture because too many modules slow too much the simulation and thus the movie. Here the speed is 1/2 the real one.
-
tetra.mpeg
(1.7Mo)
Movies of the robots co-evolved
 Locomotion of a robot made of 5 modules. This robot was created using coevolution of body and brain. The controller is a CPG based on neural networks oscillators coupled using synaptic spreading.
Locomotion of a robot made of 5 modules. This robot was created using coevolution of body and brain. The controller is a CPG based on neural networks oscillators coupled using synaptic spreading.
 Locomotion of a robot made of 7 modules. This robot was created using coevolution of body and brain. The controller is a CPG based on neural networks oscillators coupled using synaptic spreading.
Locomotion of a robot made of 7 modules. This robot was created using coevolution of body and brain. The controller is a CPG based on neural networks oscillators coupled using synaptic spreading.
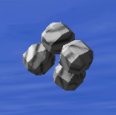 Locomotion of a robot made of 4 modules. This robot was created using coevolution of body and brain. The controller is a CPG based on neural networks oscillators coupled using synaptic spreading. He goes straight but to the top.
Locomotion of a robot made of 4 modules. This robot was created using coevolution of body and brain. The controller is a CPG based on neural networks oscillators coupled using synaptic spreading. He goes straight but to the top.
-
co_0_4m.avi
(2.1Mo)
co_0_4m.mpg (Mpeg-1, 4.2Mo)
 Locomotion of a robot made of 7 modules. This robot was created using coevolution of body and brain. The controller is a CPG based on neural networks oscillators coupled using synaptic spreading.
Locomotion of a robot made of 7 modules. This robot was created using coevolution of body and brain. The controller is a CPG based on neural networks oscillators coupled using synaptic spreading.
 Locomotion of a robot made of 8 modules. This robot was created using coevolution of body and brain. The controller is a CPG based on neural networks oscillators coupled using synaptic spreading. Its velocity is 7.25 m/min.
Locomotion of a robot made of 8 modules. This robot was created using coevolution of body and brain. The controller is a CPG based on neural networks oscillators coupled using synaptic spreading. Its velocity is 7.25 m/min.
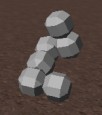 Locomotion of a robot made of 6 modules. This robot was created using coevolution of body and brain. The controller is a CPG based on neural networks oscillators coupled using synaptic spreading. It is able to achieve a velocity of 10.3 m/min.
Locomotion of a robot made of 6 modules. This robot was created using coevolution of body and brain. The controller is a CPG based on neural networks oscillators coupled using synaptic spreading. It is able to achieve a velocity of 10.3 m/min.
 Locomotion of a robot made of 7 modules. This robot was created using coevolution of body and brain. The controller is a CPG based on neural networks oscillators coupled using synaptic spreading. Its velocity is 9,8 m/min.
Locomotion of a robot made of 7 modules. This robot was created using coevolution of body and brain. The controller is a CPG based on neural networks oscillators coupled using synaptic spreading. Its velocity is 9,8 m/min.
Co-evolution with a controller which does not oscillate, but continuously rotate
 Locomotion of a robot made of 4 modules. This robot was created using coevolution of body and brain. The controller simply do rotate the motors with a dephasage.
Locomotion of a robot made of 4 modules. This robot was created using coevolution of body and brain. The controller simply do rotate the motors with a dephasage.
-
r4mRotA.avi
(1.7Mo)
r4mRotA.mpg (Mpeg-1, 3.3Mo)
r4mRotB.avi (slow motion) (2.7Mo)
r4mRotB.mpg (Mpeg-1, 2.9Mo)
r4mRotC.avi (another solution) (2.3Mo)
r4mRotC.mpg (Mpeg-1, 2.6Mo)
- Archived student projects
- Alain Dysli
- Alexandre Tuleu
- Anurag Tripathi
- Ariane Pasquier
- Aïsha Hitz
- Barthélémy von Haller
- Benjamin Fankhauser
- Benoit Rat
- Bertrand Mesot
- Biljana Petreska
- Brian Jimenez
- Christian Lathion
- Christophe Richon
- Cédric Favre
- Daisy Lachat
- Daniel Marbach
- Daniel Marbach
- Elia Palme
- Elmar Dittrich
- Etienne Dysli
- Fabrizio Patuzzo
- Fritz Menzer
- Giorgio Brambilla
- Ivan Kviatkevitch
- Jean-Christophe Fillion-Robin
- Jean-Philippe Egger
- Jennifer Meinen
- Jesse van den Kieboom
- Jocelyne Lotfi
- Julia Jesse
- Julien Gagnet
- Julien Nicolas
- Julien Ruffin
- Jérôme Braure
- Jérôme Guerra
- Jérôme Maye
- Jérôme Maye
- Kevin Drapel & Cyril Jaquier
- Kevin Drapel & Cyril Jaquier
- Loïc Matthey
- Ludovic Righetti
- Lukas Benda
- Lukas Hohl
- Lukas Hohl
- Marc-Antoine Nüssli
- Martin Biehl
- Martin Riess
- Martin Rumo
- Mathieu Salzmann
- Matteo Thomas de Giacomi
- Matteo Thomas de Giacomi
- Michael Gerber
- Michel Ganguin
- Michel Yerly
- Mikaël Mayer
- Muhamed Mehmedinovic
- Neha Priyadarshini Garg
- Nicolas Delieutraz
- Panteleimon Zotos
- Pascal Cominoli
- Pascal Cominoli
- Patrick Amstutz
- Pedro Lopez Estepa
- Pierre-Arnaud Guyot
- Rafael Arco Arredondo
- Raphaël Haberer-Proust
- Rico Möckel
- Sacha Contantinescu
- Sandra Wieser
- Sarah Marthe
- Simon Blanchoud
- Simon Capern
- Simon Lépine
- Simon Ruffieux
- Simon Rutishauser
- Stephan Singh
- Stéphane Mojon
- Stéphane Mojon
- Sébastian Gay
- Vlad Trifa
- Yvan Bourquin