
Biorobotics Laboratory BioRob
Study of new Roombots modules
Simon Blanchoud - Semester Project 2006-2007
Supervisor: Prof. Auke jan Ijspeert
Assistant: Dr. Masoud Asadpour
Simon Blanchoud - Semester Project 2006-2007
Supervisor: Prof. Auke jan Ijspeert
Assistant: Dr. Masoud Asadpour
Abstract
The Roombots project is a very vaste project: its goal is to create self-reconfigurable furniture using modular robotic. The main idea of the modular robotic is to have many modules that cooperate together in order to create a complex global behavior, or structure in our case. This project is a collaboration between Microsoft Research Cambridge and the Biologically Inspired Robotics Group (BIRG).
The main goal of this project was to develop a new module that could be used for reconfiguration in the Roombotsproject. This project focused on the suitable capabilities of the modules and not on their hardware implementation; it was developped entirely in simulation.
Documents
Report of the project along with the simulation files (BZ2, 1.0 MB)
Slides of the presentation (PDF, 483 KB)
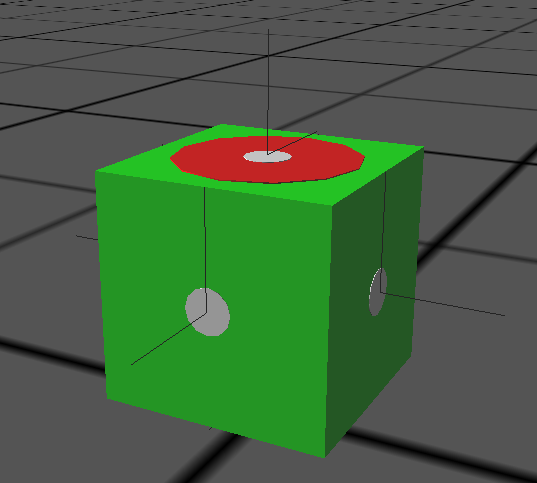
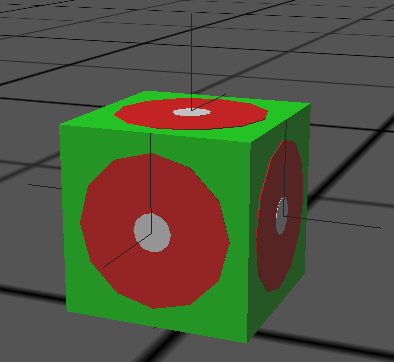
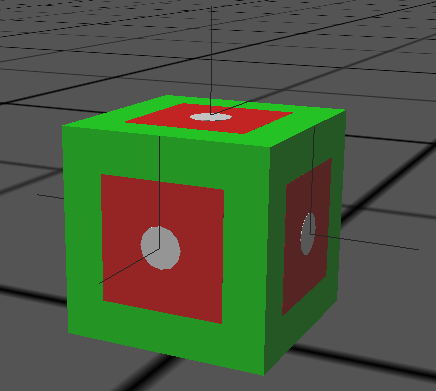
The Modules
Five cube-like modules with different characteristics were tested : Cube1, Cube2, Cube3, Cube4 and Cube5.
The Tests
Five tests were used in order to be able to rank the modules :
T1: The module should move straight forward
T2: The module should turn 90° left
T3: The module should turn 90° right
T4: The module should turn 90° up
T5: The module should turn 90°down
These tests were performed in two different environments that reflect the possible ones the
modules could encounter :
Passive Structure: The modules are moving on a ground which does not
have any servo, so they have to move totally by themselves
Active Structure: The modules are moving on a structure made out of
other modules that help them as much as possible
Macro-movements
After these tests, I analyzed more closely the most promising module : Cube2.
This allowed me to find the macro-movements of this module on active structures :
M1: Move on our own to a side module
M2: Move on our own from a face to another one
M3: Move another module from a side module onto ourselves
M4: Move another module from ourself onto a side module
M5: Move another module from a face to another one
Videos
Passive Structure
Cube2 turning right (3.9 MB)
Cube3 moving down (2.9 MB)
Active Structure
Cube1 moving up using a loading module (1.7 MB)
Cube1 moving down using a loading module (1.1 MB)
Furniture
Cube2 starting to build a stool (8.9 MB)
Links
Design and simulation of locomotion of self-organising modular robots for adaptive furniture
- Archived student projects
- Alain Dysli
- Alexandre Tuleu
- Anurag Tripathi
- Ariane Pasquier
- Aïsha Hitz
- Barthélémy von Haller
- Benjamin Fankhauser
- Benoit Rat
- Bertrand Mesot
- Biljana Petreska
- Brian Jimenez
- Christian Lathion
- Christophe Richon
- Cédric Favre
- Daisy Lachat
- Daniel Marbach
- Daniel Marbach
- Elia Palme
- Elmar Dittrich
- Etienne Dysli
- Fabrizio Patuzzo
- Fritz Menzer
- Giorgio Brambilla
- Ivan Kviatkevitch
- Jean-Christophe Fillion-Robin
- Jean-Philippe Egger
- Jennifer Meinen
- Jesse van den Kieboom
- Jocelyne Lotfi
- Julia Jesse
- Julien Gagnet
- Julien Nicolas
- Julien Ruffin
- Jérôme Braure
- Jérôme Guerra
- Jérôme Maye
- Jérôme Maye
- Kevin Drapel & Cyril Jaquier
- Kevin Drapel & Cyril Jaquier
- Loïc Matthey
- Ludovic Righetti
- Lukas Benda
- Lukas Hohl
- Lukas Hohl
- Marc-Antoine Nüssli
- Martin Biehl
- Martin Riess
- Martin Rumo
- Mathieu Salzmann
- Matteo Thomas de Giacomi
- Matteo Thomas de Giacomi
- Michael Gerber
- Michel Ganguin
- Michel Yerly
- Mikaël Mayer
- Muhamed Mehmedinovic
- Neha Priyadarshini Garg
- Nicolas Delieutraz
- Panteleimon Zotos
- Pascal Cominoli
- Pascal Cominoli
- Patrick Amstutz
- Pedro Lopez Estepa
- Pierre-Arnaud Guyot
- Rafael Arco Arredondo
- Raphaël Haberer-Proust
- Rico Möckel
- Sacha Contantinescu
- Sandra Wieser
- Sarah Marthe
- Simon Blanchoud
- Simon Capern
- Simon Lépine
- Simon Ruffieux
- Simon Rutishauser
- Stephan Singh
- Stéphane Mojon
- Stéphane Mojon
- Sébastian Gay
- Vlad Trifa
- Yvan Bourquin