
Biorobotics Laboratory BioRob
Locomotion in Modular Robots: YaMoR Host 3 and Roombots.
Abstract
Modular robotics is a relatively new but growing field constantly improving so as to give answers to some
of the main issues of the future of robotics, like locomotion in extreme conditions (other planets, wars...),
or more trivial but very challenging, like adaptable furniture. Roombots, a modular robot currently under
development at the BIRG, a laboratory of the Swiss Federal Institute of Technology (EPFL), is a new
type of modular robots with a very uncommon shape and 3 degrees of freedom per module.
The possibilities offered by this machine are difficult to measure yet, and there is a real need to understand
and see what kind of locomotion these new modules can perform.
The first part of the project focused on YaMoR Host 3, a program that facilitates the implementation
of a Central Pattern Generator on a YaMoR robot and provides an interface to run optimizations (for
locomotion).
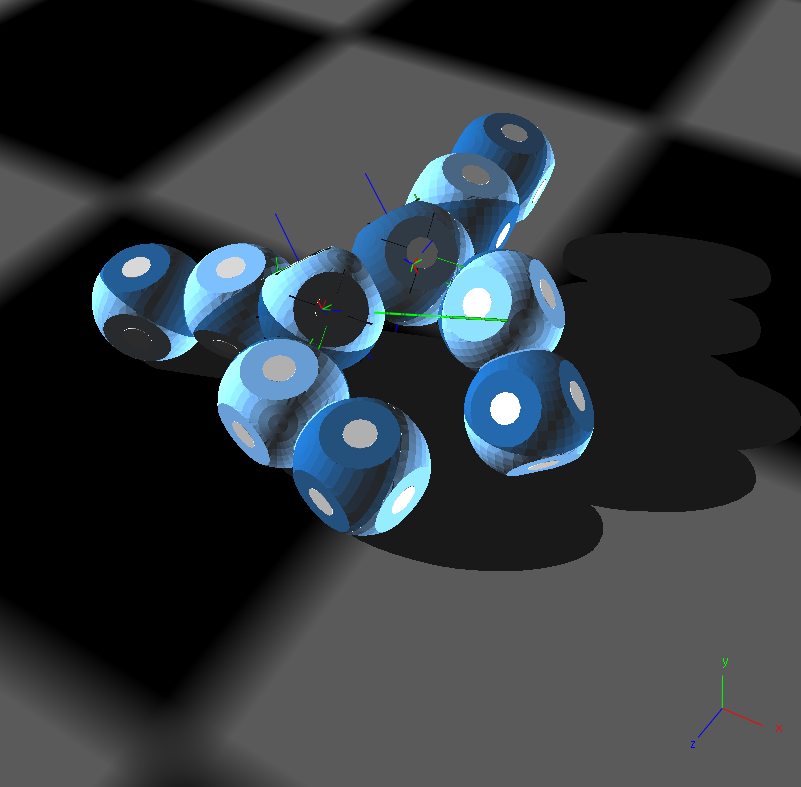
The second part was dedicated to Roombots, from the modelization to the characterization of the
locomotion possibilities: degrees of freedom, motor forces, speed, collisions, etc.
Report and presentation:
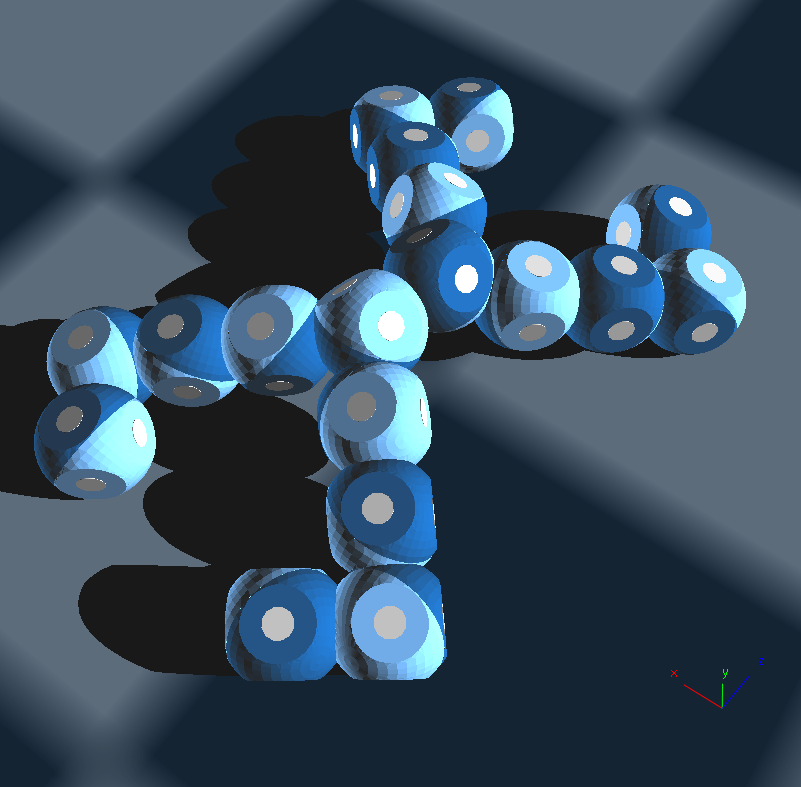
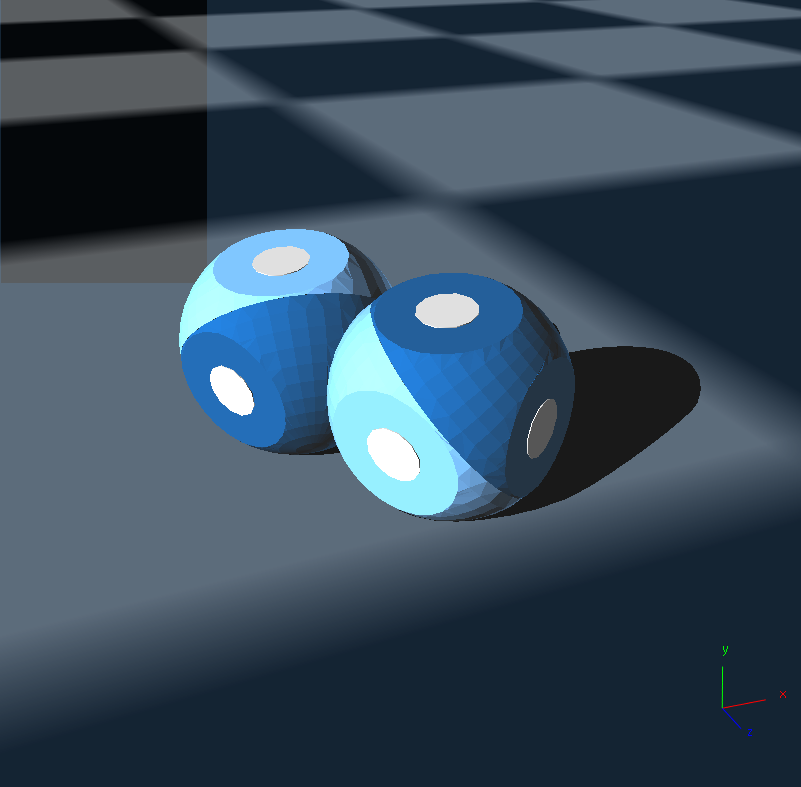
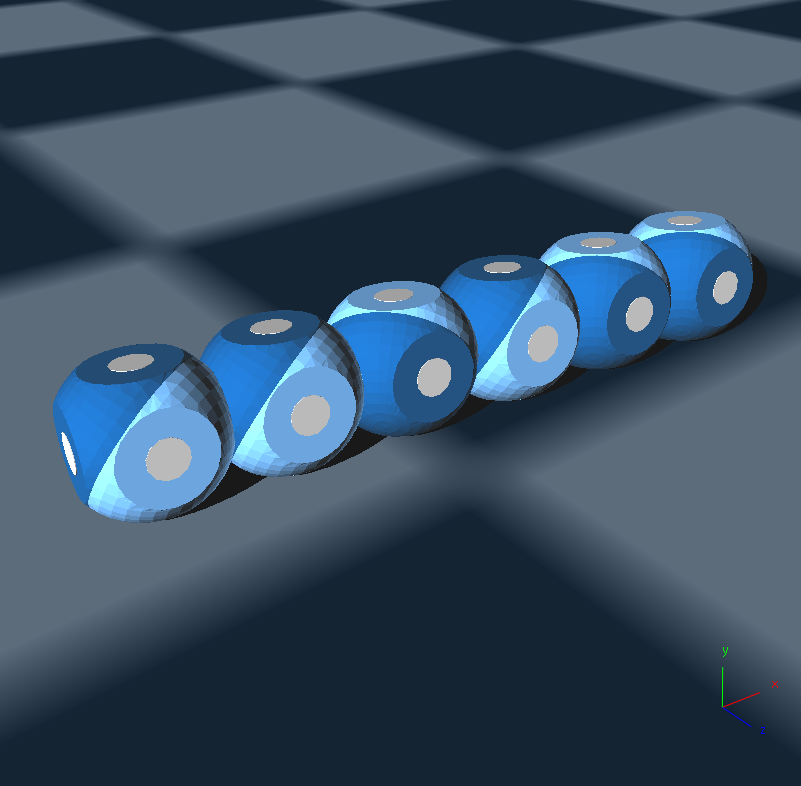
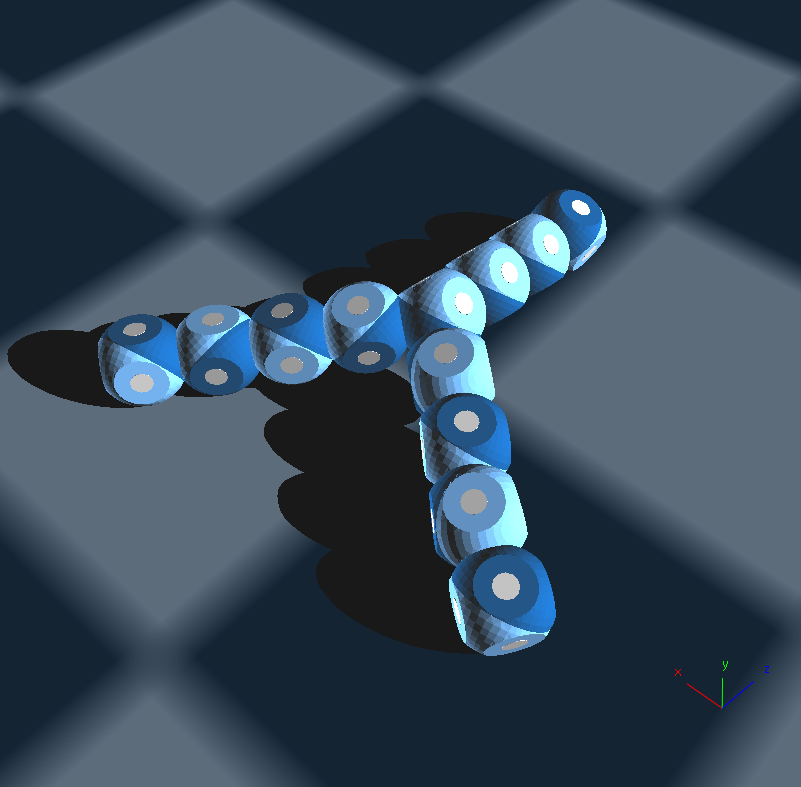
Robot configurations
Gait videos
Here are some videos of gaits obtained, at different stages of the search:
- Archived student projects
- Alain Dysli
- Alexandre Tuleu
- Anurag Tripathi
- Ariane Pasquier
- Aïsha Hitz
- Barthélémy von Haller
- Benjamin Fankhauser
- Benoit Rat
- Bertrand Mesot
- Biljana Petreska
- Brian Jimenez
- Christian Lathion
- Christophe Richon
- Cédric Favre
- Daisy Lachat
- Daniel Marbach
- Daniel Marbach
- Elia Palme
- Elmar Dittrich
- Etienne Dysli
- Fabrizio Patuzzo
- Fritz Menzer
- Giorgio Brambilla
- Ivan Kviatkevitch
- Jean-Christophe Fillion-Robin
- Jean-Philippe Egger
- Jennifer Meinen
- Jesse van den Kieboom
- Jocelyne Lotfi
- Julia Jesse
- Julien Gagnet
- Julien Nicolas
- Julien Ruffin
- Jérôme Braure
- Jérôme Guerra
- Jérôme Maye
- Jérôme Maye
- Kevin Drapel & Cyril Jaquier
- Kevin Drapel & Cyril Jaquier
- Loïc Matthey
- Ludovic Righetti
- Lukas Benda
- Lukas Hohl
- Lukas Hohl
- Marc-Antoine Nüssli
- Martin Biehl
- Martin Riess
- Martin Rumo
- Mathieu Salzmann
- Matteo Thomas de Giacomi
- Matteo Thomas de Giacomi
- Michael Gerber
- Michel Ganguin
- Michel Yerly
- Mikaël Mayer
- Muhamed Mehmedinovic
- Neha Priyadarshini Garg
- Nicolas Delieutraz
- Panteleimon Zotos
- Pascal Cominoli
- Pascal Cominoli
- Patrick Amstutz
- Pedro Lopez Estepa
- Pierre-Arnaud Guyot
- Rafael Arco Arredondo
- Raphaël Haberer-Proust
- Rico Möckel
- Sacha Contantinescu
- Sandra Wieser
- Sarah Marthe
- Simon Blanchoud
- Simon Capern
- Simon Lépine
- Simon Ruffieux
- Simon Rutishauser
- Stephan Singh
- Stéphane Mojon
- Stéphane Mojon
- Sébastian Gay
- Vlad Trifa
- Yvan Bourquin