
Biorobotics Laboratory BioRob
Boxybot: design and realization of a fish robot

The world of fishes is extraordinarily diversified: each fish has evolved to adapt efficiently to its environment. Despite that fact, fish propulsion systems aren't used in common applications.
However, some universities are studying the possibility to develop better and noiseless propulsion systems for autonomous underwater vehicles with fishlike locomotion.
The review of fish robots shows that cruising has been already studied with success, but the autonomy is always restrained. Maneuvering has been less studied.
Realization
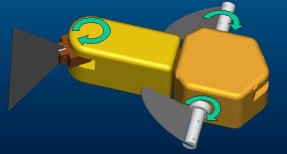
Amphibot II modules have been used to build the fish robot: the most adapted swimming mode is labriform or ostraciiform because it doesn't require a good hydrodynamic profile.
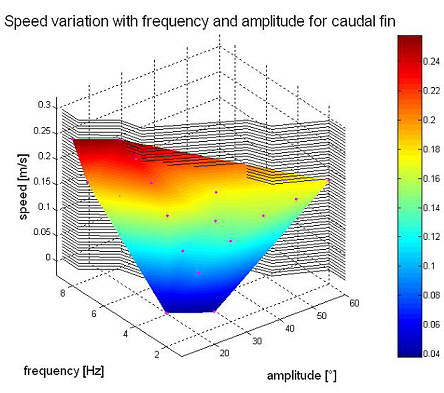
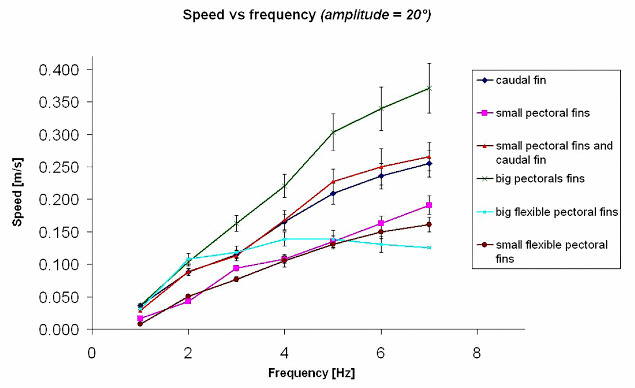
Relations between forward speed, amplitude and frequency of fin's oscillations have been characterized.
Results
The fish robot, named BoxyBot in reference to the Boxfish, is 0.25 m long and can swim up to 0.37 m/s, the minimal radius of turning observed is 0.13 m. The robot can dive, go forwards and backwards, swim on the side and do spins.
Project report
-
Report_BoxyBot.pdf
Project report (without appendixes)
Report_BoxyBot_appendixes_scan.pdf Scan of the appendixes from the report (11.5 MB)
presentation.pdf
Movie of demonstration of BoxyBot I
Movies of BoxyBot II
A new version of BoxyBot that includes sensory systems had been built recently.
- Archived student projects
- Alain Dysli
- Alexandre Tuleu
- Anurag Tripathi
- Ariane Pasquier
- Aïsha Hitz
- Barthélémy von Haller
- Benjamin Fankhauser
- Benoit Rat
- Bertrand Mesot
- Biljana Petreska
- Brian Jimenez
- Christian Lathion
- Christophe Richon
- Cédric Favre
- Daisy Lachat
- Daniel Marbach
- Daniel Marbach
- Elia Palme
- Elmar Dittrich
- Etienne Dysli
- Fabrizio Patuzzo
- Fritz Menzer
- Giorgio Brambilla
- Ivan Kviatkevitch
- Jean-Christophe Fillion-Robin
- Jean-Philippe Egger
- Jennifer Meinen
- Jesse van den Kieboom
- Jocelyne Lotfi
- Julia Jesse
- Julien Gagnet
- Julien Nicolas
- Julien Ruffin
- Jérôme Braure
- Jérôme Guerra
- Jérôme Maye
- Jérôme Maye
- Kevin Drapel & Cyril Jaquier
- Kevin Drapel & Cyril Jaquier
- Loïc Matthey
- Ludovic Righetti
- Lukas Benda
- Lukas Hohl
- Lukas Hohl
- Marc-Antoine Nüssli
- Martin Biehl
- Martin Riess
- Martin Rumo
- Mathieu Salzmann
- Matteo Thomas de Giacomi
- Matteo Thomas de Giacomi
- Michael Gerber
- Michel Ganguin
- Michel Yerly
- Mikaël Mayer
- Muhamed Mehmedinovic
- Neha Priyadarshini Garg
- Nicolas Delieutraz
- Panteleimon Zotos
- Pascal Cominoli
- Pascal Cominoli
- Patrick Amstutz
- Pedro Lopez Estepa
- Pierre-Arnaud Guyot
- Rafael Arco Arredondo
- Raphaël Haberer-Proust
- Rico Möckel
- Sacha Contantinescu
- Sandra Wieser
- Sarah Marthe
- Simon Blanchoud
- Simon Capern
- Simon Lépine
- Simon Ruffieux
- Simon Rutishauser
- Stephan Singh
- Stéphane Mojon
- Stéphane Mojon
- Sébastian Gay
- Vlad Trifa
- Yvan Bourquin