
Biorobotics Laboratory BioRob
Report and presentation
Roombot modules - Kinematics Considerations
for Moving Optimizations
for Moving Optimizations
Mikaël Mayer
January 6, 2009
Abstract
The roombots are modular robots being developed by the BIRG team, as the succession of many worldwide attempts to build robots that humans will be using in their tomorrow's house. The new possibilities that they are offering, such as these 6 degrees of freedom when combined in pairs make them good candidates to fulfill the promises that we are expecting from such domestic robots.
Self-reconfiguration is one of the main keywords for these robots. And robustness as well. But for the roombot modules, we still lacked a way to understand their moves good enough so that we would be able to give them complex and automatized tasks.
In this project, we will present the clarification of concepts such as the possible moves in space of the roombot modules, the resolution of inverse kinematics for a lot of potential configurations, and some experiments where we coordinate all previous results and interface them with Webots, a robot-simulation environment.
Videos
The construction of the back of the chair is the main video:
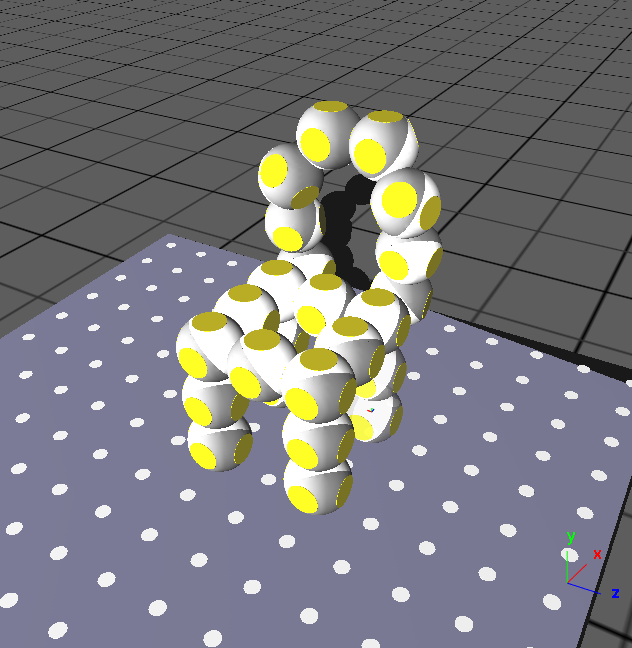 |
08roombot-back-chair-making.avi The main video: it tests the locomotion, the reachable space, forward and inverse kinematics, locking and unlocking, in order to let two meta-modules form the back of a tiny chair. |
All videos :
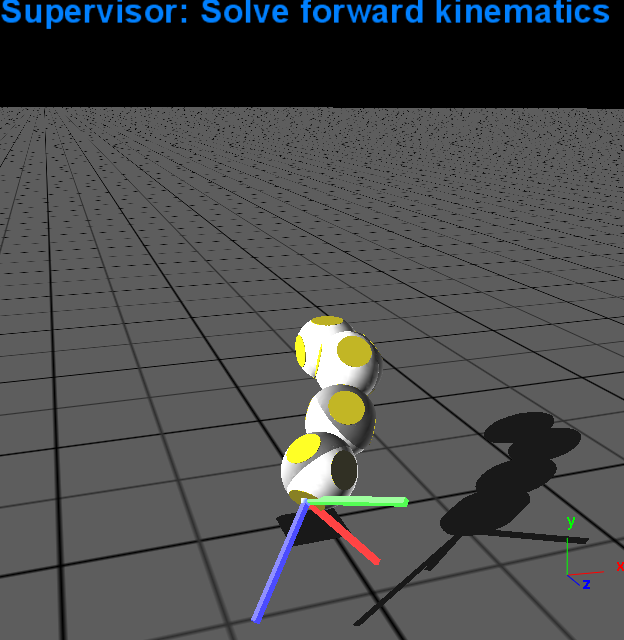 |
01roombot-solvingFK.avi We present there the first forward kinematics solved in our model.. It means that the meta-module now knows where it is goint to if it modify its angles. |
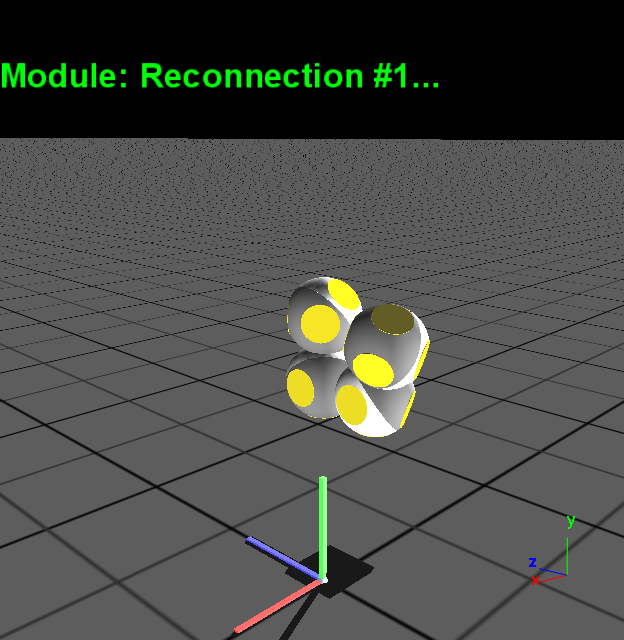 |
02roombot-reconfiguration1.avi Testing the lock and unlock possibilities, along with movement. The meta-module is reconfigurated such that the chain looses one degree of freedom. The purpose is to recover it. |
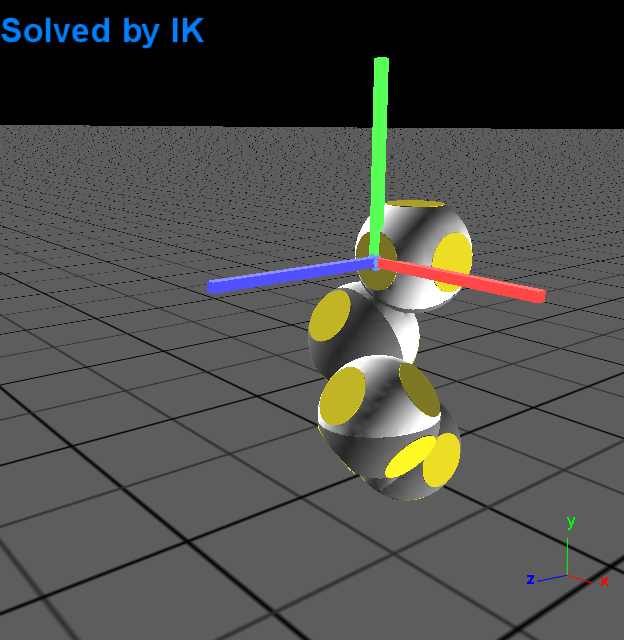 |
03roombot-solvingIK.avi We present here the first inverse kinematics solved in our model. We can see at some point that one module cannot reach its goal, so it reaches it backwards. |
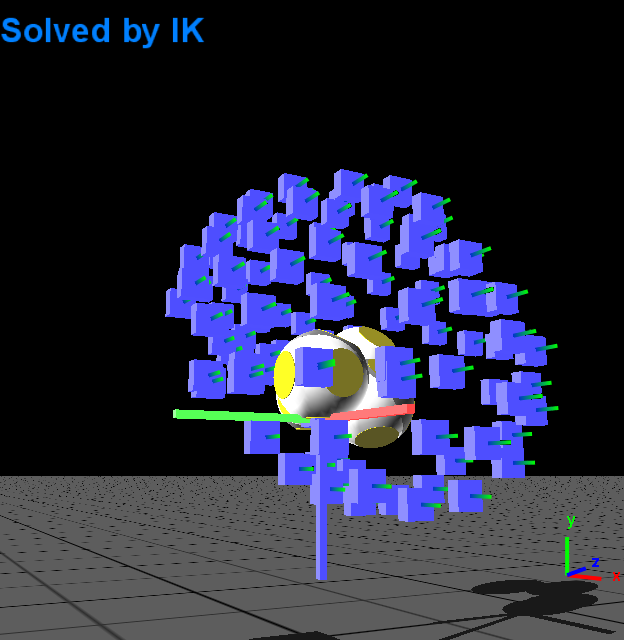 |
04roombot-reachable-space-Z.avi Very short video presenting the theoretic reachable "sphere" in space, without self-intersection check, and such that the final position has its Z axis oriented in the same position as the global Z axis. |
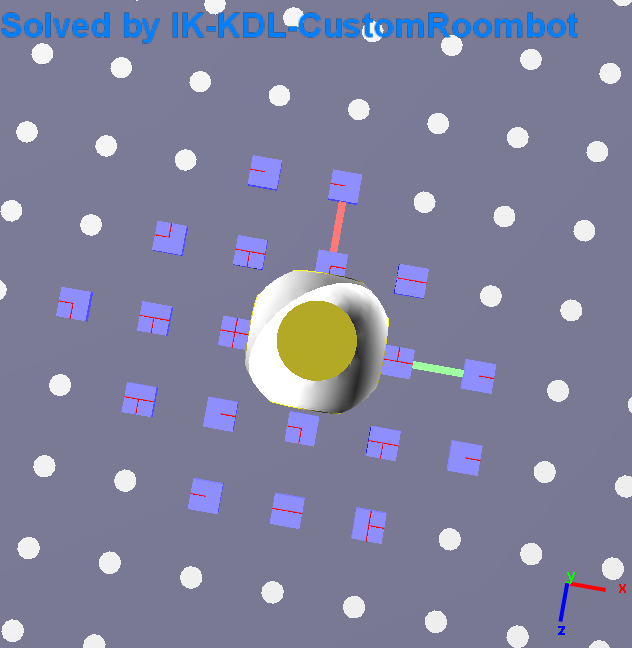 |
05roombot-plan-reachable-space.avi Quite long video presenting the attemps to reach positions on a grid, thanks to the inverse kinematics. |
|
06roombot-moving-reachable-space.avi Exactly the same as the previous video, but this time, it locks and unlocks to move, thus almost randomly, but in a pleasant way. |
 |
07roombot-three-modules-reconfiguration1.avi The acrobats: With an increased torque (the real roombot is not able to lift so many), it presents an exchange of 3 roombots from one position to the other. |
|
08roombot-back-chair-making.avi The main video: it tests the locomotion, the reachable space, forward and inverse kinematics, locking and unlocking, in order to let two meta-modules form the back of a tiny chair. |
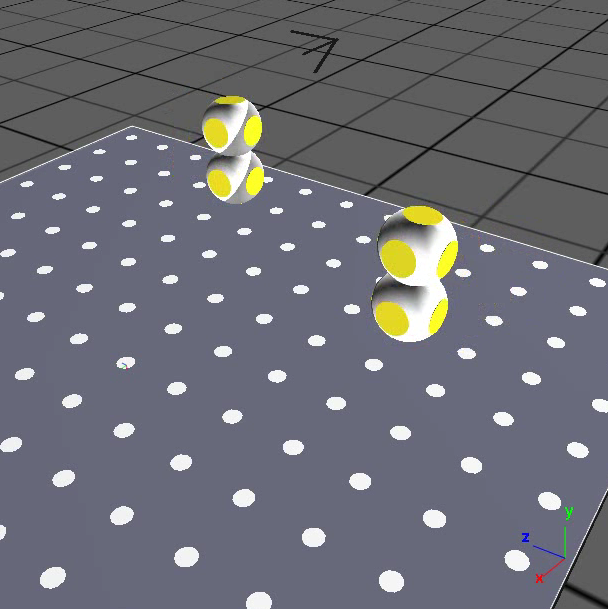 |
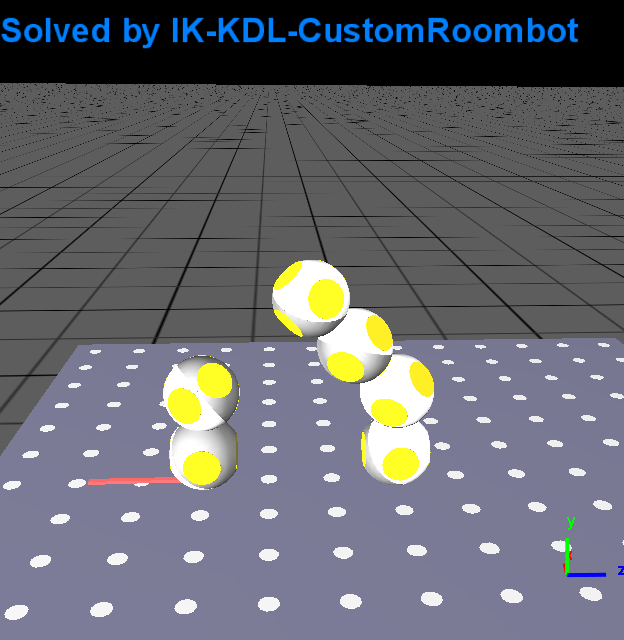
09roombot-one-module-moving.avi Presentation video to prove that a single roombot module is able to move on its own over a grid of connectors. |
- Archived student projects
- Alain Dysli
- Alexandre Tuleu
- Anurag Tripathi
- Ariane Pasquier
- Aïsha Hitz
- Barthélémy von Haller
- Benjamin Fankhauser
- Benoit Rat
- Bertrand Mesot
- Biljana Petreska
- Brian Jimenez
- Christian Lathion
- Christophe Richon
- Cédric Favre
- Daisy Lachat
- Daniel Marbach
- Daniel Marbach
- Elia Palme
- Elmar Dittrich
- Etienne Dysli
- Fabrizio Patuzzo
- Fritz Menzer
- Giorgio Brambilla
- Ivan Kviatkevitch
- Jean-Christophe Fillion-Robin
- Jean-Philippe Egger
- Jennifer Meinen
- Jesse van den Kieboom
- Jocelyne Lotfi
- Julia Jesse
- Julien Gagnet
- Julien Nicolas
- Julien Ruffin
- Jérôme Braure
- Jérôme Guerra
- Jérôme Maye
- Jérôme Maye
- Kevin Drapel & Cyril Jaquier
- Kevin Drapel & Cyril Jaquier
- Loïc Matthey
- Ludovic Righetti
- Lukas Benda
- Lukas Hohl
- Lukas Hohl
- Marc-Antoine Nüssli
- Martin Biehl
- Martin Riess
- Martin Rumo
- Mathieu Salzmann
- Matteo Thomas de Giacomi
- Matteo Thomas de Giacomi
- Michael Gerber
- Michel Ganguin
- Michel Yerly
- Mikaël Mayer
- Muhamed Mehmedinovic
- Neha Priyadarshini Garg
- Nicolas Delieutraz
- Panteleimon Zotos
- Pascal Cominoli
- Pascal Cominoli
- Patrick Amstutz
- Pedro Lopez Estepa
- Pierre-Arnaud Guyot
- Rafael Arco Arredondo
- Raphaël Haberer-Proust
- Rico Möckel
- Sacha Contantinescu
- Sandra Wieser
- Sarah Marthe
- Simon Blanchoud
- Simon Capern
- Simon Lépine
- Simon Ruffieux
- Simon Rutishauser
- Stephan Singh
- Stéphane Mojon
- Stéphane Mojon
- Sébastian Gay
- Vlad Trifa
- Yvan Bourquin