
Biorobotics Laboratory BioRob
Master project : Toward Emancipation of Furniture. A Kinematics-Dependent Reconfiguration Algorithm for Chain-Type Modular Robots
 Modular robots are complex systems composed of a set of simple robotic units.
Modular robots are complex systems composed of a set of simple robotic units.These units can rearrange to change the shape of the whole structure. This ability enables the reconfigurable robots to be extremely adaptive to changes in the environment and task. The most common applications of these systems are in space exploration where their versatility is a big advantage.
Our project is very distant from this field. The aim of the project is to use modular robot units to build furniture that could change shape and locomote in various environments.
This project tackles the problem of reconfiguration of a set of modular units: basically, what are the necessary connections and disconnections to reconfigure one shape to another ? This problem is NP-Hard and can be viewed as a graph theory problem, but in this case, we do not take into account the kinematical restrictions of the modules. Thus, the sequences found are not necessarily feasible on the real system. We introduce kinematical information in our model in order to avoid internal collisions and disconnection of the structure.
Tree representations
 The main goal of our project is to build the tree of all possible connections and disconnections (ie : each node of the tree is obtained from its parent by making one connection or one disconnection). But in order to connect two modules one have to first move them in contact to one another, which is not always possible or sometimes involves making very complex movements.
The main goal of our project is to build the tree of all possible connections and disconnections (ie : each node of the tree is obtained from its parent by making one connection or one disconnection). But in order to connect two modules one have to first move them in contact to one another, which is not always possible or sometimes involves making very complex movements.To be able to compute only the valid connections we built the tree of all possible servo movements, detecting and avoiding the internal collisions of the structure.
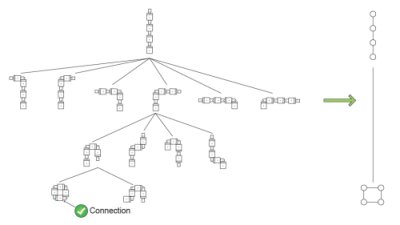
The picture on the left represents an example of this tree. The tree on the left is the Servo Movement Tree and the one on the right is a part of the Moves Tree which represents every possible connections and disconnections.
The problem here is that the number of nodes in this tree (thus the size of the search space) grows exponentially with the number of modules. Its size is proven to be
 . Thus, we need ways to guide the searching process in this huge space.
. Thus, we need ways to guide the searching process in this huge space.Heuristics
The first heuristic that we designed was based on the following observation: the probability to be able to make new connections is inversely proportional to the mean distance between the modules. For each servo, we have the choice to place it in three positions: -90°, 0° or +90°. Our heuristics automatically selects the position for which the moving modules get the nearest to the rest of the structure. This enables us to decrease the complexity by 2n.We further simplified the searching process by removing the duplicates of the search space. This is done by storing a unique key for each successful sequence of servo movements in a hash table. Our algorithm verifies that a node is not already present in this hash table before adding it to the tree.
We get a final complexity of O(2n), which is still exponential but of a much less order of magnitude than before.
To give an example, one of our test samples would take about 22 hours to complete by explicitly searching the tree while it would take about 5 seconds by using our complexity reduction techniques.
Files
Engineer Diploma Project : IMOROD : Interface for MOdular RObots Design. Conception and Development of a 3D Robotic Interface for the Roombots project.
The Roombots project is meant to be applied in the new Learning Center of the EPFL. Ideally a room would be equipped with Roombots and any user could interact with them, to make them change shape or position.
The precedents project (Master project) aims at automating the reconfiguration process given an initial and a final configuration. This reconfiguration process is transparent to the user.
But the user still has to describe at least the final configuration (the initial one can be considered to be the current one).
This engineer project aims at conceive and develop a simple user interface enabling any user to easily design complex robotic structure by assembling virtual 3D modules.
The main functionalities of this interface would be :
- Building, visualizing, saving robot structures
- Building full rooms (by positioning previously designed furniture in a virtual room)
- Visualizing reconfiguration sequences (importing the sequences and watching the virtual robot change shape)
- Easy to use for any user
- Portable, particularly to UNIX systems
- Inter-operable and compatible with Webots and the reconfiguration planning software
- Easily extensible : this is even more important that the project is not fully developed yet and might be taken over by some other developer
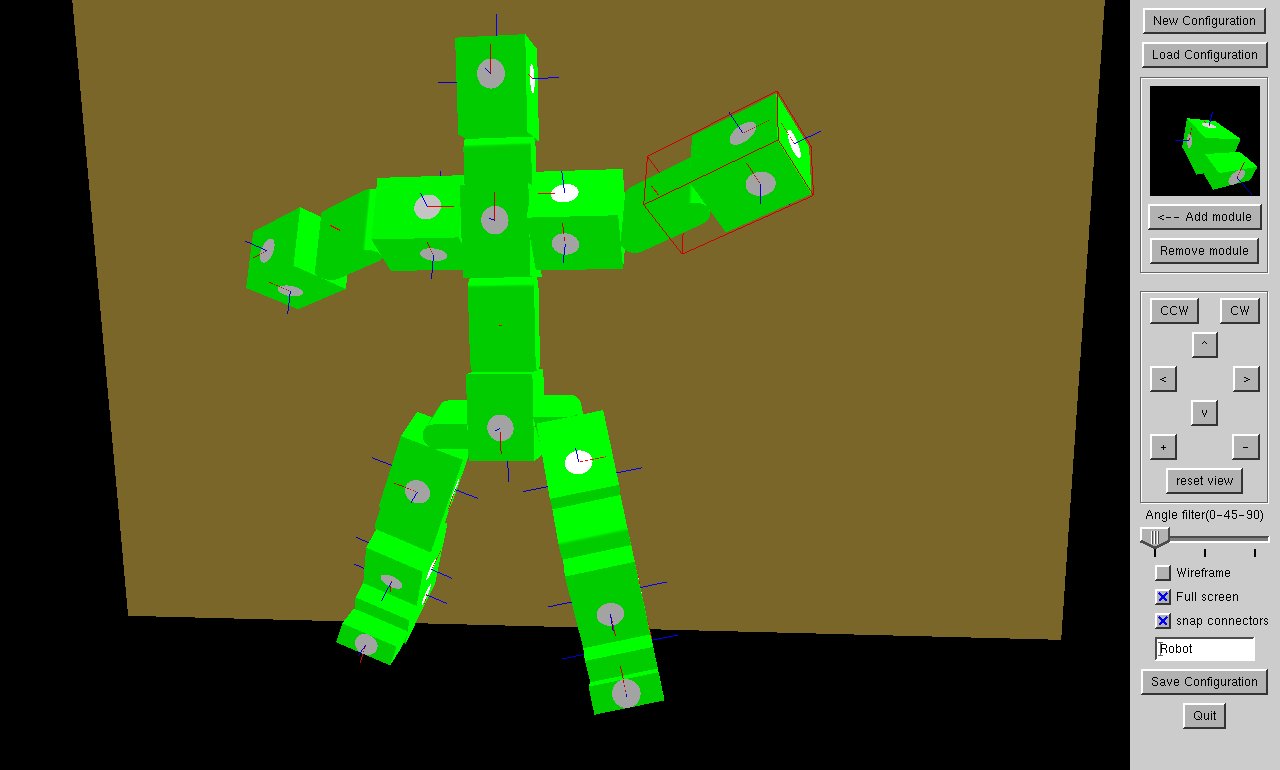
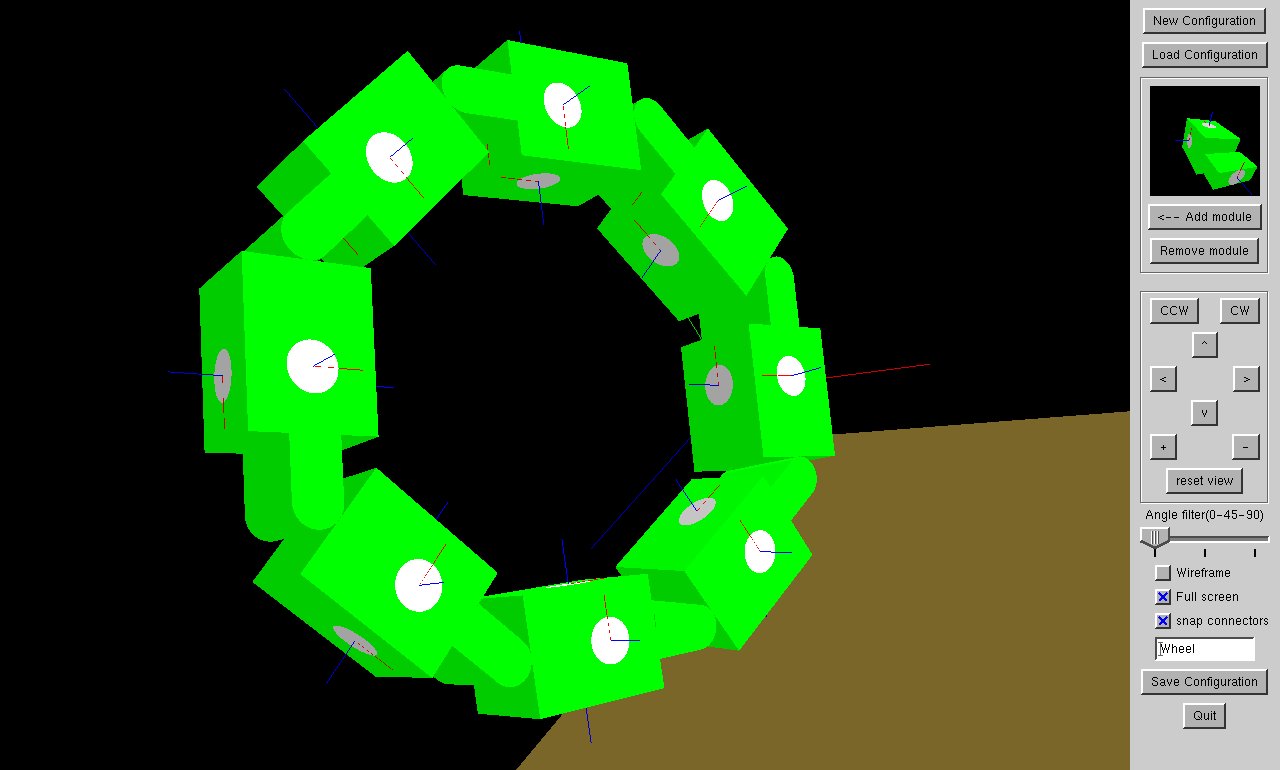
The interface that we designed is very simple and intuitive, usable almost only with the mouse and contains a few common controls to help the user. We named it IMOROD for Interface for MOdular RObots Design. We used C++ as coding language, OpenGL as graphics library and GLOW as widgets library and C++ wrapper for GLUT and OpenGL.
We wrote a user interface which is a easy to understand, well illustrated, step by step tutorial to master all the functionalities of IMOROD.
We also wrote a developer interface containing all the guidelines for further development of the solution as well as a simplified class reference.
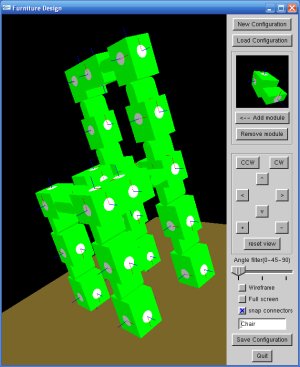
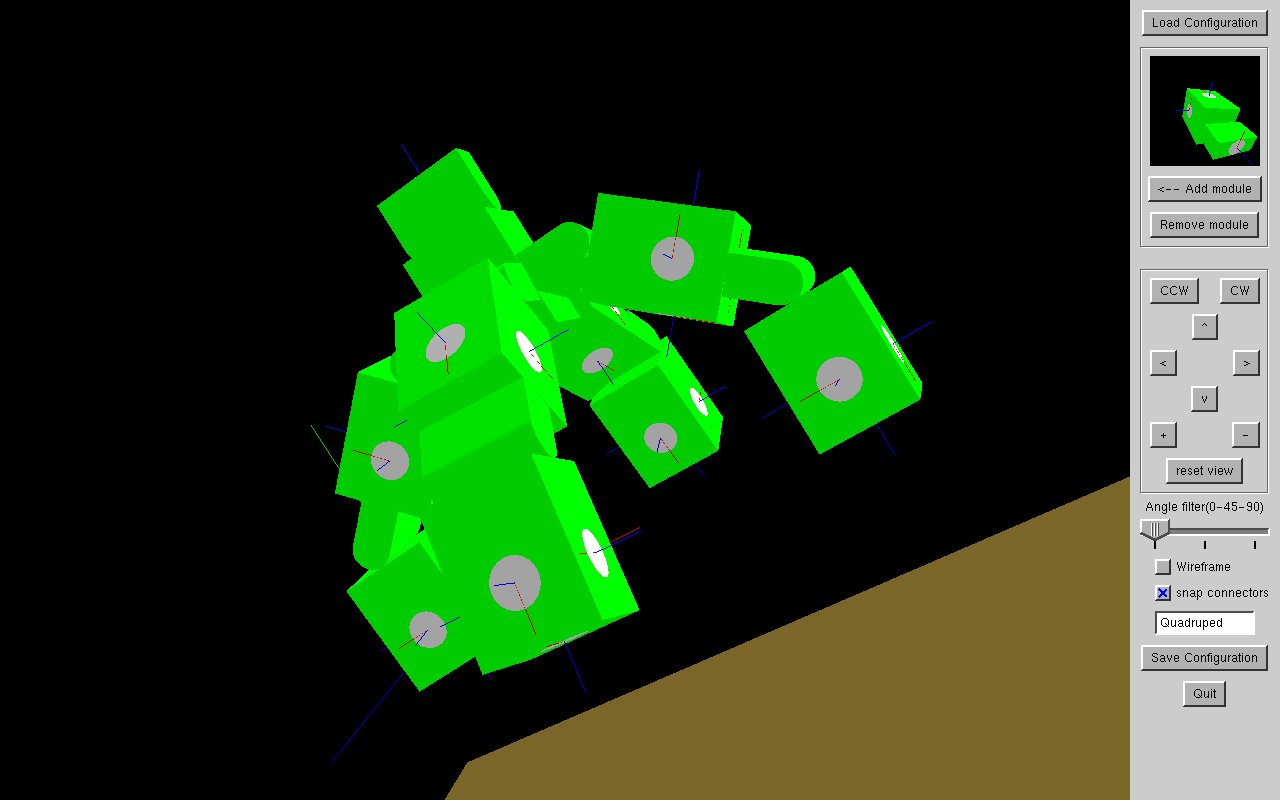
These documents are available below as well as some screenshots of the application.
Screenshots


Files
- Archived student projects
- Alain Dysli
- Alexandre Tuleu
- Anurag Tripathi
- Ariane Pasquier
- Aïsha Hitz
- Barthélémy von Haller
- Benjamin Fankhauser
- Benoit Rat
- Bertrand Mesot
- Biljana Petreska
- Brian Jimenez
- Christian Lathion
- Christophe Richon
- Cédric Favre
- Daisy Lachat
- Daniel Marbach
- Daniel Marbach
- Elia Palme
- Elmar Dittrich
- Etienne Dysli
- Fabrizio Patuzzo
- Fritz Menzer
- Giorgio Brambilla
- Ivan Kviatkevitch
- Jean-Christophe Fillion-Robin
- Jean-Philippe Egger
- Jennifer Meinen
- Jesse van den Kieboom
- Jocelyne Lotfi
- Julia Jesse
- Julien Gagnet
- Julien Nicolas
- Julien Ruffin
- Jérôme Braure
- Jérôme Guerra
- Jérôme Maye
- Jérôme Maye
- Kevin Drapel & Cyril Jaquier
- Kevin Drapel & Cyril Jaquier
- Loïc Matthey
- Ludovic Righetti
- Lukas Benda
- Lukas Hohl
- Lukas Hohl
- Marc-Antoine Nüssli
- Martin Biehl
- Martin Riess
- Martin Rumo
- Mathieu Salzmann
- Matteo Thomas de Giacomi
- Matteo Thomas de Giacomi
- Michael Gerber
- Michel Ganguin
- Michel Yerly
- Mikaël Mayer
- Muhamed Mehmedinovic
- Neha Priyadarshini Garg
- Nicolas Delieutraz
- Panteleimon Zotos
- Pascal Cominoli
- Pascal Cominoli
- Patrick Amstutz
- Pedro Lopez Estepa
- Pierre-Arnaud Guyot
- Rafael Arco Arredondo
- Raphaël Haberer-Proust
- Rico Möckel
- Sacha Contantinescu
- Sandra Wieser
- Sarah Marthe
- Simon Blanchoud
- Simon Capern
- Simon Lépine
- Simon Ruffieux
- Simon Rutishauser
- Stephan Singh
- Stéphane Mojon
- Stéphane Mojon
- Sébastian Gay
- Vlad Trifa
- Yvan Bourquin