
Biorobotics Laboratory BioRob
Simon Rutishauser (semester project 2008) - Cheetah: compliant quadruped robot
Abstract
In this project a new quadruped robot ``Cheetah'' is developed and implemented. ``Cheetah'' features three-segment legs with passive compliant knee joints. Each leg has two degrees of freedom - knee and hip joint can be actuated using RC servo motors.
Simple electronics to command the actuators from a desktop computer have been designed in order to test the robot. Ideas for more complete autonomous electronics are sketched.
Preliminary tests were performed to verify the correct functioning of the mechanical design.
Three-segment compliant pantograph leg
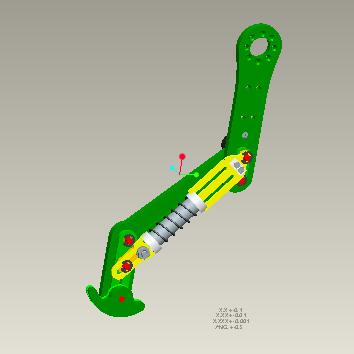 Several actuation principles and cinematics were evaluated - resulting in the leg design shown on the CAD picture.
Several actuation principles and cinematics were evaluated - resulting in the leg design shown on the CAD picture.
The leg segment lengths were chosen such as to be energetically advantageous. In order to dimension the leg stiffness and actuators, a simple spring-mass model for walking and running was introduced and solved for the given leg dimensions and estimated stroke frequencies for different gaits.
Simple test electronics were designed using a PIC test board an a simple custom-made power supply board. Ideas for more powerful autonomous electronics and power supply have been drafted as well.
Pictures and Movies
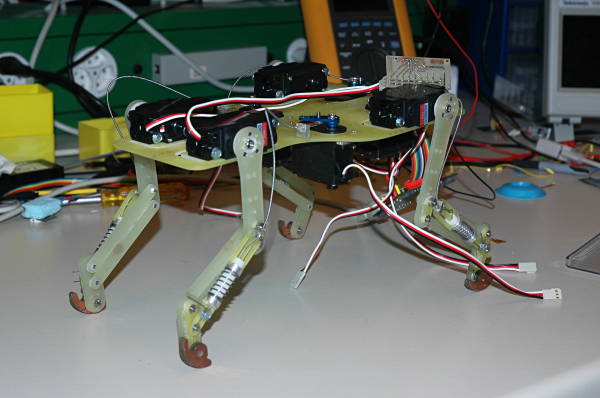 The movies show some of the preliminary tests performed with the "Cheetah"-roboter:
The movies show some of the preliminary tests performed with the "Cheetah"-roboter:
cheetah1.avi: cheetah lifts its left fore leg
cheetah2.avi: crouching down and standing up again
cheetah3.avi: fast hip movement
cheetah4.avi: passive compliance in the knee joints
Report
- Archived student projects
- Alain Dysli
- Alexandre Tuleu
- Anurag Tripathi
- Ariane Pasquier
- Aïsha Hitz
- Barthélémy von Haller
- Benjamin Fankhauser
- Benoit Rat
- Bertrand Mesot
- Biljana Petreska
- Brian Jimenez
- Christian Lathion
- Christophe Richon
- Cédric Favre
- Daisy Lachat
- Daniel Marbach
- Daniel Marbach
- Elia Palme
- Elmar Dittrich
- Etienne Dysli
- Fabrizio Patuzzo
- Fritz Menzer
- Giorgio Brambilla
- Ivan Kviatkevitch
- Jean-Christophe Fillion-Robin
- Jean-Philippe Egger
- Jennifer Meinen
- Jesse van den Kieboom
- Jocelyne Lotfi
- Julia Jesse
- Julien Gagnet
- Julien Nicolas
- Julien Ruffin
- Jérôme Braure
- Jérôme Guerra
- Jérôme Maye
- Jérôme Maye
- Kevin Drapel & Cyril Jaquier
- Kevin Drapel & Cyril Jaquier
- Loïc Matthey
- Ludovic Righetti
- Lukas Benda
- Lukas Hohl
- Lukas Hohl
- Marc-Antoine Nüssli
- Martin Biehl
- Martin Riess
- Martin Rumo
- Mathieu Salzmann
- Matteo Thomas de Giacomi
- Matteo Thomas de Giacomi
- Michael Gerber
- Michel Ganguin
- Michel Yerly
- Mikaël Mayer
- Muhamed Mehmedinovic
- Neha Priyadarshini Garg
- Nicolas Delieutraz
- Panteleimon Zotos
- Pascal Cominoli
- Pascal Cominoli
- Patrick Amstutz
- Pedro Lopez Estepa
- Pierre-Arnaud Guyot
- Rafael Arco Arredondo
- Raphaël Haberer-Proust
- Rico Möckel
- Sacha Contantinescu
- Sandra Wieser
- Sarah Marthe
- Simon Blanchoud
- Simon Capern
- Simon Lépine
- Simon Ruffieux
- Simon Rutishauser
- Stephan Singh
- Stéphane Mojon
- Stéphane Mojon
- Sébastian Gay
- Vlad Trifa
- Yvan Bourquin