
Biorobotics Laboratory BioRob
Design of an ARM based microcontroller circuit board for the Amphibot II robot
Semester project, summer 2005
Author : Alain Dysli
Supervisor : Alessandro Crespi
Professor : Auke Jan Ijspeert
Goal of the project
The goal of this project is to design a new controller circuit board for the Amphibot II robot using a new more powerful microcrontroller. The software to handle this device will also be written.
Abstract
The Amphibot I robot was built in the purpose to mimic animal locomotion like the snake's or lamprey's. But the lack of independence due to weak microcontroller and bus performance haven't allowed the robot to be autonomous. The Amphibot II robot comes with a new, more spacious design that allow a more powerful microcontroller to be integrated.
The Philips ARM LPC2129 is chosen to fulfill the increased demand in computational power in this new robot. Along with the ARM more connectors appear on the circuit and the Amphibot II becomes a powerful and expandable robot. But designing the hardware parts doesn't come alone and the software to control those new high performances functionalities must be written.
The result is a powerful and expandable circuit that can handle several external high performances sensors and devices and communicate with all the other circuits of the same kind through its high speed CAN bus.
Pictures
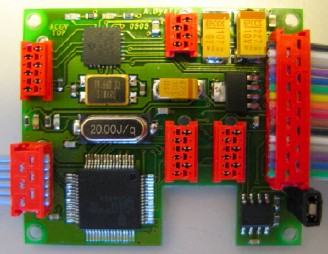 Picture of the top side of the SALAMCTRL printed circuit board.
Picture of the top side of the SALAMCTRL printed circuit board.
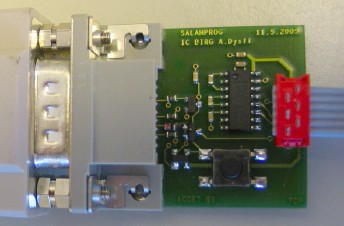 Picture of the top side of the SALAMPROG printed circuit board connected to a serial port.
Picture of the top side of the SALAMPROG printed circuit board connected to a serial port.
Downloads
-
Design of an ARM based microcontroller circuit board.pdf
Report of the project in english (1.9 Mo)
Conception d’une carte à microcontrôleur ARM pour le robot Amphibot II.ppt Slides of the presentation in french (480 Ko)
Conception d’une carte à microcontrôleur ARM pour le robot Amphibot II.ppt.pdf Slides of the presentation in french in PDF format (700 Ko)
- Archived student projects
- Alain Dysli
- Alexandre Tuleu
- Anurag Tripathi
- Ariane Pasquier
- Aïsha Hitz
- Barthélémy von Haller
- Benjamin Fankhauser
- Benoit Rat
- Bertrand Mesot
- Biljana Petreska
- Brian Jimenez
- Christian Lathion
- Christophe Richon
- Cédric Favre
- Daisy Lachat
- Daniel Marbach
- Daniel Marbach
- Elia Palme
- Elmar Dittrich
- Etienne Dysli
- Fabrizio Patuzzo
- Fritz Menzer
- Giorgio Brambilla
- Ivan Kviatkevitch
- Jean-Christophe Fillion-Robin
- Jean-Philippe Egger
- Jennifer Meinen
- Jesse van den Kieboom
- Jocelyne Lotfi
- Julia Jesse
- Julien Gagnet
- Julien Nicolas
- Julien Ruffin
- Jérôme Braure
- Jérôme Guerra
- Jérôme Maye
- Jérôme Maye
- Kevin Drapel & Cyril Jaquier
- Kevin Drapel & Cyril Jaquier
- Loïc Matthey
- Ludovic Righetti
- Lukas Benda
- Lukas Hohl
- Lukas Hohl
- Marc-Antoine Nüssli
- Martin Biehl
- Martin Riess
- Martin Rumo
- Mathieu Salzmann
- Matteo Thomas de Giacomi
- Matteo Thomas de Giacomi
- Michael Gerber
- Michel Ganguin
- Michel Yerly
- Mikaël Mayer
- Muhamed Mehmedinovic
- Neha Priyadarshini Garg
- Nicolas Delieutraz
- Panteleimon Zotos
- Pascal Cominoli
- Pascal Cominoli
- Patrick Amstutz
- Pedro Lopez Estepa
- Pierre-Arnaud Guyot
- Rafael Arco Arredondo
- Raphaël Haberer-Proust
- Rico Möckel
- Sacha Contantinescu
- Sandra Wieser
- Sarah Marthe
- Simon Blanchoud
- Simon Capern
- Simon Lépine
- Simon Ruffieux
- Simon Rutishauser
- Stephan Singh
- Stéphane Mojon
- Stéphane Mojon
- Sébastian Gay
- Vlad Trifa
- Yvan Bourquin