
Biorobotics Laboratory BioRob
Locomotion in Modular Robotics - Roombot Module
Roombot Module
Sandra Wieser
Assistant: Alexander Spröwitz
Professor: Auke Jan Ispeert
Abstract
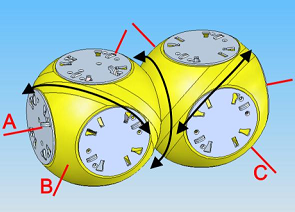 Roombot module is a modular robot derived at BIRG, EPFL. It has three degrees of freedom and can connect to other Roombot modules by mechanical connectors. A lot of projects have taken place around this new module, covering various aspects like shape and mechanical structure of the module, self-reconfiguration and locomotion of robots made of Roombots modules. The main novelties presented in this project are the implementation of Central Pattern Generator for the command of motors, the introduction of passive elements in the robot structure, and the possibility for a motor to be in constant rotation, as a wheel.
Roombot module is a modular robot derived at BIRG, EPFL. It has three degrees of freedom and can connect to other Roombot modules by mechanical connectors. A lot of projects have taken place around this new module, covering various aspects like shape and mechanical structure of the module, self-reconfiguration and locomotion of robots made of Roombots modules. The main novelties presented in this project are the implementation of Central Pattern Generator for the command of motors, the introduction of passive elements in the robot structure, and the possibility for a motor to be in constant rotation, as a wheel.
In this project three robots made of Roombot modules and passive elements are tested. A locomotion gait is search for each robot with a different strategy. Strategies are different in the choice of the optimization algorithm (Powell's algorithm, Golden Section Search Algorithm, Systematical Search), the choice of optimized parameters and of course the global structure of the robot. Results are presented for two of the robots, and follow an iterative research. The second strategy is based on the results of the first robot's results, and the third robot and strategy is based on previous results and conclusions.
In general, this project demonstrates that the optimization algorithms used for the robots doesn't succeed in finding an effective locomotion gait. Best results are indeed obtained with manual optimization, without using any optimization algorithm. A really noisy fitness function could explain this failure.
This report presents the three robots tested, the methodology used and the problems encountered, as well as the results of two of the tested robots and a discussion part. The discussion comes back on the choice of an optimization method and on the pattern observed on the result graphics.
Files
- The report (pdf)
- Middle presentation (ppt)
- Middle presentation (pdf)
- Final Presentation (ppt)
- Final Presentation (pdf)
Videos
Chair Robot:
Table Robot:
Big Chair Robot:
- Archived student projects
- Alain Dysli
- Alexandre Tuleu
- Anurag Tripathi
- Ariane Pasquier
- Aïsha Hitz
- Barthélémy von Haller
- Benjamin Fankhauser
- Benoit Rat
- Bertrand Mesot
- Biljana Petreska
- Brian Jimenez
- Christian Lathion
- Christophe Richon
- Cédric Favre
- Daisy Lachat
- Daniel Marbach
- Daniel Marbach
- Elia Palme
- Elmar Dittrich
- Etienne Dysli
- Fabrizio Patuzzo
- Fritz Menzer
- Giorgio Brambilla
- Ivan Kviatkevitch
- Jean-Christophe Fillion-Robin
- Jean-Philippe Egger
- Jennifer Meinen
- Jesse van den Kieboom
- Jocelyne Lotfi
- Julia Jesse
- Julien Gagnet
- Julien Nicolas
- Julien Ruffin
- Jérôme Braure
- Jérôme Guerra
- Jérôme Maye
- Jérôme Maye
- Kevin Drapel & Cyril Jaquier
- Kevin Drapel & Cyril Jaquier
- Loïc Matthey
- Ludovic Righetti
- Lukas Benda
- Lukas Hohl
- Lukas Hohl
- Marc-Antoine Nüssli
- Martin Biehl
- Martin Riess
- Martin Rumo
- Mathieu Salzmann
- Matteo Thomas de Giacomi
- Matteo Thomas de Giacomi
- Michael Gerber
- Michel Ganguin
- Michel Yerly
- Mikaël Mayer
- Muhamed Mehmedinovic
- Neha Priyadarshini Garg
- Nicolas Delieutraz
- Panteleimon Zotos
- Pascal Cominoli
- Pascal Cominoli
- Patrick Amstutz
- Pedro Lopez Estepa
- Pierre-Arnaud Guyot
- Rafael Arco Arredondo
- Raphaël Haberer-Proust
- Rico Möckel
- Sacha Contantinescu
- Sandra Wieser
- Sarah Marthe
- Simon Blanchoud
- Simon Capern
- Simon Lépine
- Simon Ruffieux
- Simon Rutishauser
- Stephan Singh
- Stéphane Mojon
- Stéphane Mojon
- Sébastian Gay
- Vlad Trifa
- Yvan Bourquin