
Biorobotics Laboratory BioRob
Design and construction of an autonomous Modular Robot Unit with Bluetooth and FPGA
Rico Möckel
internship 2004
Modular Robot Unit
 Aim of this modular robot project was to construct an autonomous modular robot unit with one degree of freedom and a wireless interface. During this project I was responsible for the development of the electronics, control software, VHDL and Bluetooth Protocols described below.
Aim of this modular robot project was to construct an autonomous modular robot unit with one degree of freedom and a wireless interface. During this project I was responsible for the development of the electronics, control software, VHDL and Bluetooth Protocols described below.
Documentation
Movie of a wireless controlled module (1.7MB)
Getting Started User Guide 1.0 (1.2MB) Gives an introduction to how to use YaMoR
Bluetooth Board Reference Guide 1.0 (1.4MB) Describes Bluetooth board
FPGA Board Reference Guide 1.0 (1.4MB) Describes FPGA board
Power Board Reference Guide 1.0 (1.2MB) Describes Power board
Electronics
The robot module contains the following boards:
- Bluetooth Board
- FPGA Board
- Power Board
Bluetooth Board
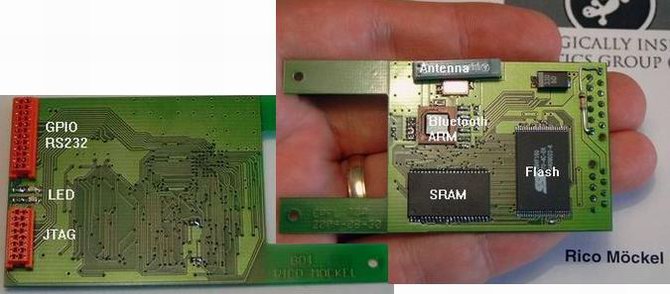
Main features:
- System on Chip, combination of RF Bluetooth components and ARM core
- Embedded Bluetooth stack and own appications runing on ARM
- 8 Mbit SRAM
- Up to 32 Mbit Flash memory
- Programmable by JTAG and via RS232 with Flash loader tool
FPGA Board
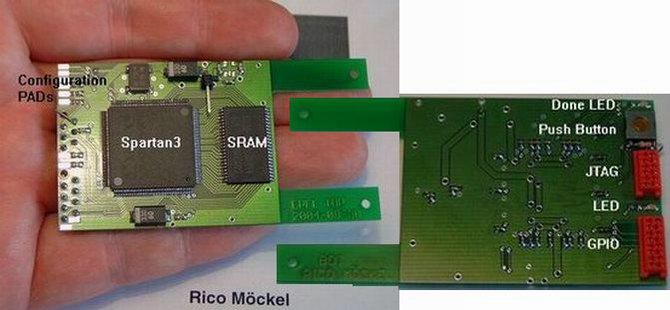
Main features:
- Spartan 3 FPGA with 400.000 gates
- 4 Mbit high speed SRAM (10 ns)
- FPGA programmable with JTAG interface or via Slave Serial mode
- Use up to 6 MicroBlaze inside the FPGA (one with SRAM)
Power Board
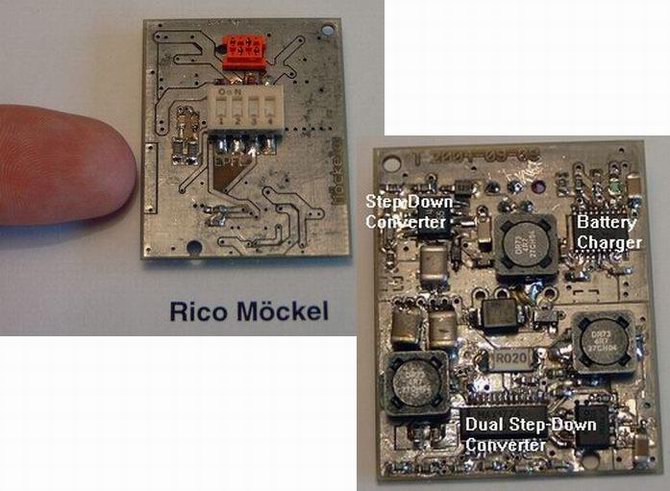
Main features:
- Provides 3 different voltages
- Step-Down Converter for high efficiency
- Battery Charger
- Battery Protection like protection from discharging too much
- Automatic switch over from battery to external power supply when connected
- Archived student projects
- Alain Dysli
- Alexandre Tuleu
- Anurag Tripathi
- Ariane Pasquier
- Aïsha Hitz
- Barthélémy von Haller
- Benjamin Fankhauser
- Benoit Rat
- Bertrand Mesot
- Biljana Petreska
- Brian Jimenez
- Christian Lathion
- Christophe Richon
- Cédric Favre
- Daisy Lachat
- Daniel Marbach
- Daniel Marbach
- Elia Palme
- Elmar Dittrich
- Etienne Dysli
- Fabrizio Patuzzo
- Fritz Menzer
- Giorgio Brambilla
- Ivan Kviatkevitch
- Jean-Christophe Fillion-Robin
- Jean-Philippe Egger
- Jennifer Meinen
- Jesse van den Kieboom
- Jocelyne Lotfi
- Julia Jesse
- Julien Gagnet
- Julien Nicolas
- Julien Ruffin
- Jérôme Braure
- Jérôme Guerra
- Jérôme Maye
- Jérôme Maye
- Kevin Drapel & Cyril Jaquier
- Kevin Drapel & Cyril Jaquier
- Loïc Matthey
- Ludovic Righetti
- Lukas Benda
- Lukas Hohl
- Lukas Hohl
- Marc-Antoine Nüssli
- Martin Biehl
- Martin Riess
- Martin Rumo
- Mathieu Salzmann
- Matteo Thomas de Giacomi
- Matteo Thomas de Giacomi
- Michael Gerber
- Michel Ganguin
- Michel Yerly
- Mikaël Mayer
- Muhamed Mehmedinovic
- Neha Priyadarshini Garg
- Nicolas Delieutraz
- Panteleimon Zotos
- Pascal Cominoli
- Pascal Cominoli
- Patrick Amstutz
- Pedro Lopez Estepa
- Pierre-Arnaud Guyot
- Rafael Arco Arredondo
- Raphaël Haberer-Proust
- Rico Möckel
- Sacha Contantinescu
- Sandra Wieser
- Sarah Marthe
- Simon Blanchoud
- Simon Capern
- Simon Lépine
- Simon Ruffieux
- Simon Rutishauser
- Stephan Singh
- Stéphane Mojon
- Stéphane Mojon
- Sébastian Gay
- Vlad Trifa
- Yvan Bourquin