
Biorobotics Laboratory BioRob
Adaptive CPG
Adaptive Four Legged Locomotion Control
Based on Nonlinear Dynamical Systems
Abstract:Dynamical systems have been increasingly studied in the last decade for designing locomotion controllers. They offer several advantages over previous solutions like synchronization, smooth transitions under parameter variation, and robustness. We present a locomotion controller for four legged robots. |
|
||
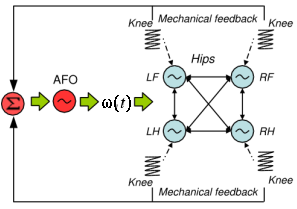
Overview:The controller we propose is suitable for robotic implementation and might be suitable for biological modeling. It adapts its walking frequency to the physical properties of the robot. Hopf oscillators and adaptive frequency oscillators are used as building blocks in the controller. Adaptation is embedded in the dynamical systems, and no external optimization is required. Moreover, adaptation is not a batch process, and the controller adapts its parameters online using proprioceptive signals. The robot locomotion is based on two different kinds of joints: knees - passively controlled by springs, and hips - actively controlled by servos. The robot swings on the knees behaving like an inverted pendulum. A Hopf oscillator controls each hip. Each of these oscillators is coupled to the other hips for inter-limbs gait coordination. Moreover, each hip is coupled in phase to the relative knee. This movement coordination permits to recycle the potential energy of the knee springs to push the robot forward. An Adaptive Frequency Oscillator (AFO) tunes its frequency to the knee oscillations, and this frequency is used for the hip oscillators. This controller has two feedback loops: one permits phase synchronization to proprioceptor signals and the second frequency adaptation. |
 |
||
|
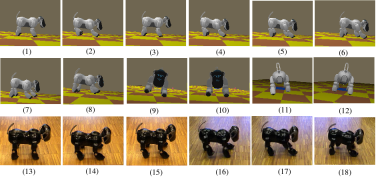
Simulation Movies (Webots):In this video the robot start with a walking frequency of 1.27 [Hz] (or 8 [rad/s]): WebotsFrom8.avi In this video the robot start walking from scratch, it means frequency of 0 [Hz]: WebotsFromScratch.avi Aibo Real Robot Movies:In this video the robot swing, and it shows how work the simulated knee spring: AiboSwing.avi In this video the robot walk from scratch, also with an additional weight of 0.4 [Kg]: AiboWalkFromScratch.avi |
|||
Note:How we have simulate a spring on an Aibo knee: aibo_spring.pdf |

- Archived student projects
- Alain Dysli
- Alexandre Tuleu
- Anurag Tripathi
- Ariane Pasquier
- Aïsha Hitz
- Barthélémy von Haller
- Benjamin Fankhauser
- Benoit Rat
- Bertrand Mesot
- Biljana Petreska
- Brian Jimenez
- Christian Lathion
- Christophe Richon
- Cédric Favre
- Daisy Lachat
- Daniel Marbach
- Daniel Marbach
- Elia Palme
- Elmar Dittrich
- Etienne Dysli
- Fabrizio Patuzzo
- Fritz Menzer
- Giorgio Brambilla
- Ivan Kviatkevitch
- Jean-Christophe Fillion-Robin
- Jean-Philippe Egger
- Jennifer Meinen
- Jesse van den Kieboom
- Jocelyne Lotfi
- Julia Jesse
- Julien Gagnet
- Julien Nicolas
- Julien Ruffin
- Jérôme Braure
- Jérôme Guerra
- Jérôme Maye
- Jérôme Maye
- Kevin Drapel & Cyril Jaquier
- Kevin Drapel & Cyril Jaquier
- Loïc Matthey
- Ludovic Righetti
- Lukas Benda
- Lukas Hohl
- Lukas Hohl
- Marc-Antoine Nüssli
- Martin Biehl
- Martin Riess
- Martin Rumo
- Mathieu Salzmann
- Matteo Thomas de Giacomi
- Matteo Thomas de Giacomi
- Michael Gerber
- Michel Ganguin
- Michel Yerly
- Mikaël Mayer
- Muhamed Mehmedinovic
- Neha Priyadarshini Garg
- Nicolas Delieutraz
- Panteleimon Zotos
- Pascal Cominoli
- Pascal Cominoli
- Patrick Amstutz
- Pedro Lopez Estepa
- Pierre-Arnaud Guyot
- Rafael Arco Arredondo
- Raphaël Haberer-Proust
- Rico Möckel
- Sacha Contantinescu
- Sandra Wieser
- Sarah Marthe
- Simon Blanchoud
- Simon Capern
- Simon Lépine
- Simon Ruffieux
- Simon Rutishauser
- Stephan Singh
- Stéphane Mojon
- Stéphane Mojon
- Sébastian Gay
- Vlad Trifa
- Yvan Bourquin