
Biorobotics Laboratory BioRob
Projet de Semestre
Environnement virtuel de modélisation de mouvements humains et de stimulation musculaire
été 2007
Candidat : Cédric Favre
Assistants : Ludovic Righetti & Yves Stauffer
Professeur : Reymond Clavel & Auke Ijspeert
Context
Le projet a été réalisé en collaboration avec le LSRO - Medical Devices & Biomechanics Group de l'EPFL. Il s'inscrit dans un programme de développement de systèmes robotiques pour la rééducation de personnes paraplégiques, en collaboration avec la Fondation Suisse pour les Cyberthèses et Swortec SA. LSRO - Cyberthèse.But
Le but principal de ce
projet est de vérifier que Webots (un logiciel de réalité virtuel) est capable
de simuler fidèlement un système aussi complexe que les membres inférieurs d'un
humain en mouvement et pour se faire de créer un modèle humanoïde qui sera
soumis à divers tests de validation.Déroulement
Le projet est composé de trois phases distinctes :
- Modélisation visuelle de l'humanoïde.
- Mesures des couples aux articulations, afin de vérifier l'exactitude de la simulation physique.
- Commande des articulations en couple et validation de la simulation conjointe de l'orthèse du genou et de l'humanoïde.
Résultats Principaux :
Le robot humanoïde a été modélisé avec succès. Il suit des trajectoires de marche réelles. Le modèle possède une interface graphique permettant de mettre en évidence divers mouvements lors de la marche.
Les couples mesurés aux articulations sont similaires en forme à ceux générés par le modèle Matlab de Yves Allemand, Des différences d'intensité sont cependant mesurées. Ces dernières semblent principalement dues au fait que les deux modèles utilisent des données biomécaniques différentes.
Le modèle de muscle présenté par le docteur P.Métraillé a été implémenté et testé par l'intermédiaire d'une simulation de l'orthèse du genou. Les résultats montrent le comportement souhaité, la seule différence avec le modèle original étant le moment passif induit par les ligaments et autres forces biomécaniques qui ne sont pas simulés dans le modèle Webots.
Images
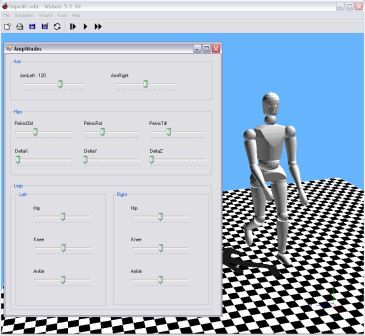 Interface graphique permettant de mettre en évidence différents mouvements
Interface graphique permettant de mettre en évidence différents mouvements |
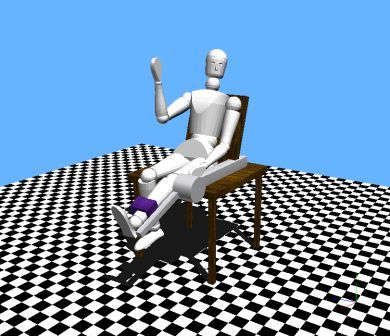 Le modèle de l'humanoïde et de l'orthèse du genou
Le modèle de l'humanoïde et de l'orthèse du genou
|
- Archived student projects
- Alain Dysli
- Alexandre Tuleu
- Anurag Tripathi
- Ariane Pasquier
- Aïsha Hitz
- Barthélémy von Haller
- Benjamin Fankhauser
- Benoit Rat
- Bertrand Mesot
- Biljana Petreska
- Brian Jimenez
- Christian Lathion
- Christophe Richon
- Cédric Favre
- Daisy Lachat
- Daniel Marbach
- Daniel Marbach
- Elia Palme
- Elmar Dittrich
- Etienne Dysli
- Fabrizio Patuzzo
- Fritz Menzer
- Giorgio Brambilla
- Ivan Kviatkevitch
- Jean-Christophe Fillion-Robin
- Jean-Philippe Egger
- Jennifer Meinen
- Jesse van den Kieboom
- Jocelyne Lotfi
- Julia Jesse
- Julien Gagnet
- Julien Nicolas
- Julien Ruffin
- Jérôme Braure
- Jérôme Guerra
- Jérôme Maye
- Jérôme Maye
- Kevin Drapel & Cyril Jaquier
- Kevin Drapel & Cyril Jaquier
- Loïc Matthey
- Ludovic Righetti
- Lukas Benda
- Lukas Hohl
- Lukas Hohl
- Marc-Antoine Nüssli
- Martin Biehl
- Martin Riess
- Martin Rumo
- Mathieu Salzmann
- Matteo Thomas de Giacomi
- Matteo Thomas de Giacomi
- Michael Gerber
- Michel Ganguin
- Michel Yerly
- Mikaël Mayer
- Muhamed Mehmedinovic
- Neha Priyadarshini Garg
- Nicolas Delieutraz
- Panteleimon Zotos
- Pascal Cominoli
- Pascal Cominoli
- Patrick Amstutz
- Pedro Lopez Estepa
- Pierre-Arnaud Guyot
- Rafael Arco Arredondo
- Raphaël Haberer-Proust
- Rico Möckel
- Sacha Contantinescu
- Sandra Wieser
- Sarah Marthe
- Simon Blanchoud
- Simon Capern
- Simon Lépine
- Simon Ruffieux
- Simon Rutishauser
- Stephan Singh
- Stéphane Mojon
- Stéphane Mojon
- Sébastian Gay
- Vlad Trifa
- Yvan Bourquin