
Biorobotics Laboratory BioRob
Semester Project, spring semester 2009: Locomotion exploiting body dynamics on the Cheetah robot
Abstract
This project aims at designing a simple model of the Cheetah robot under Webots simulation software. Cheetah is a small, light wight quadruped robot that faetures three segmented legs, thus very pronounced body dynamics. The model should make abstraction of the complex physics of the legs but should still produce a close to reality behavior. Furthermore, a pre-existing CPG capable of various gaits had to be implemented. The interest of this work lies in the exploration of various parameters that affect locomotion, like stance phase duration or the amplitude of oscillation for the hip servos. The goal is to determine the most efficient sets of parameters for each gait.
Cheetah Model
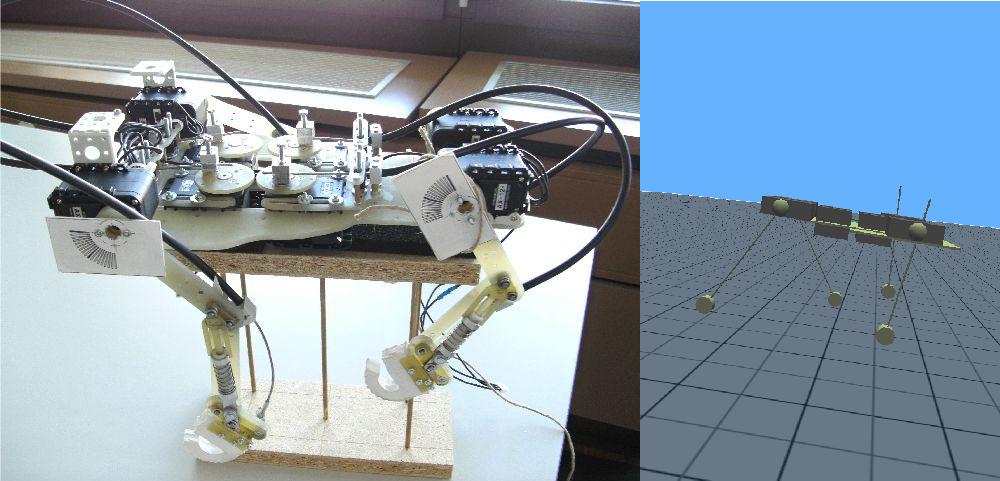 The model developped for the Cheetah robot. Note that the complex leg design was replaced with a rather simple Webots components. This was achieved by making all the calculations for the leg retraction at the controller level. This approach yields a greater modularity for the model : leg designs can be changed at will with no changes to the model.
The model developped for the Cheetah robot. Note that the complex leg design was replaced with a rather simple Webots components. This was achieved by making all the calculations for the leg retraction at the controller level. This approach yields a greater modularity for the model : leg designs can be changed at will with no changes to the model.
Movies
The movies for different gaits and retraction models are available.
CheetahBound.m1v
CheetahBoundDR.m1v
CheetahPace.m1v
CheetahPaceDR.m1v
CheetahTrot.m1v
CheetahTrotDR.m1v
CheetahWalk.m1v
CheetahWalkDR.m1v
Report
- Archived student projects
- Alain Dysli
- Alexandre Tuleu
- Anurag Tripathi
- Ariane Pasquier
- Aïsha Hitz
- Barthélémy von Haller
- Benjamin Fankhauser
- Benoit Rat
- Bertrand Mesot
- Biljana Petreska
- Brian Jimenez
- Christian Lathion
- Christophe Richon
- Cédric Favre
- Daisy Lachat
- Daniel Marbach
- Daniel Marbach
- Elia Palme
- Elmar Dittrich
- Etienne Dysli
- Fabrizio Patuzzo
- Fritz Menzer
- Giorgio Brambilla
- Ivan Kviatkevitch
- Jean-Christophe Fillion-Robin
- Jean-Philippe Egger
- Jennifer Meinen
- Jesse van den Kieboom
- Jocelyne Lotfi
- Julia Jesse
- Julien Gagnet
- Julien Nicolas
- Julien Ruffin
- Jérôme Braure
- Jérôme Guerra
- Jérôme Maye
- Jérôme Maye
- Kevin Drapel & Cyril Jaquier
- Kevin Drapel & Cyril Jaquier
- Loïc Matthey
- Ludovic Righetti
- Lukas Benda
- Lukas Hohl
- Lukas Hohl
- Marc-Antoine Nüssli
- Martin Biehl
- Martin Riess
- Martin Rumo
- Mathieu Salzmann
- Matteo Thomas de Giacomi
- Matteo Thomas de Giacomi
- Michael Gerber
- Michel Ganguin
- Michel Yerly
- Mikaël Mayer
- Muhamed Mehmedinovic
- Neha Priyadarshini Garg
- Nicolas Delieutraz
- Panteleimon Zotos
- Pascal Cominoli
- Pascal Cominoli
- Patrick Amstutz
- Pedro Lopez Estepa
- Pierre-Arnaud Guyot
- Rafael Arco Arredondo
- Raphaël Haberer-Proust
- Rico Möckel
- Sacha Contantinescu
- Sandra Wieser
- Sarah Marthe
- Simon Blanchoud
- Simon Capern
- Simon Lépine
- Simon Ruffieux
- Simon Rutishauser
- Stephan Singh
- Stéphane Mojon
- Stéphane Mojon
- Sébastian Gay
- Vlad Trifa
- Yvan Bourquin