
Biorobotics Laboratory BioRob
Semester project in the spring semester 2008: Development and Test of a Model for the Cheetah Robot
Goals
This project builds upon Simon Rutishauser's, to be found here, where he constructed the quadruped compliant robot Cheetah. It aims at first creating a realistic model of the robot in the Webots modeling software and then to implement a pre-existing CPG on it to run parameter searches for different gaits.
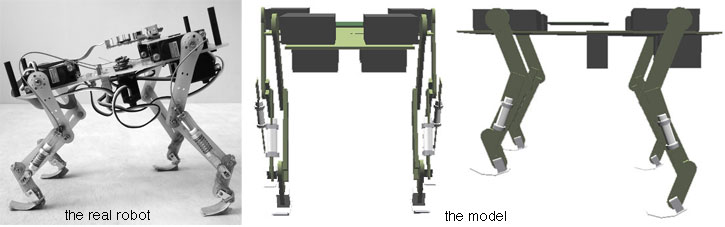
The model
-
The real robot on the left in comparison to the model developed during the project. The springs in the legs were replaced by physics plugin-controlled linear servos.
The leg mechanism
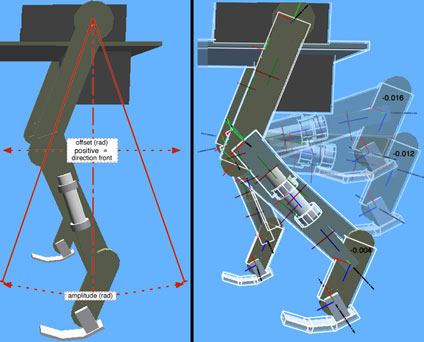 The three-segment legs only have 2 degrees of freedom due to a pantograph mechanism: the special construction makes the first and third leg segment stay parallel at all times. The right part of the picture shows the leg in different states of compression
The three-segment legs only have 2 degrees of freedom due to a pantograph mechanism: the special construction makes the first and third leg segment stay parallel at all times. The right part of the picture shows the leg in different states of compression
Movies of the experiments
The following correspond to the optimal parameter settings found during experiments done for the project. The files ending with "Naive" were results of the first set of parameters with very strong springs and the default friction parameter for the feet. The files ending with "Friction" were created with a second set of experiments with softer springs and an infinite friction between the feet and the ground.
-
walkNaive.mpeg
trotNaive.mpeg
boundNaive.mpeg
paceNaive.mpeg
walkFrictionSlow.mpeg
walkFriction.mpeg
trotFriction.mpeg
paceFriction.mpeg
boundFriction.mpeg
Report
The report of the project
- Archived student projects
- Alain Dysli
- Alexandre Tuleu
- Anurag Tripathi
- Ariane Pasquier
- Aïsha Hitz
- Barthélémy von Haller
- Benjamin Fankhauser
- Benoit Rat
- Bertrand Mesot
- Biljana Petreska
- Brian Jimenez
- Christian Lathion
- Christophe Richon
- Cédric Favre
- Daisy Lachat
- Daniel Marbach
- Daniel Marbach
- Elia Palme
- Elmar Dittrich
- Etienne Dysli
- Fabrizio Patuzzo
- Fritz Menzer
- Giorgio Brambilla
- Ivan Kviatkevitch
- Jean-Christophe Fillion-Robin
- Jean-Philippe Egger
- Jennifer Meinen
- Jesse van den Kieboom
- Jocelyne Lotfi
- Julia Jesse
- Julien Gagnet
- Julien Nicolas
- Julien Ruffin
- Jérôme Braure
- Jérôme Guerra
- Jérôme Maye
- Jérôme Maye
- Kevin Drapel & Cyril Jaquier
- Kevin Drapel & Cyril Jaquier
- Loïc Matthey
- Ludovic Righetti
- Lukas Benda
- Lukas Hohl
- Lukas Hohl
- Marc-Antoine Nüssli
- Martin Biehl
- Martin Riess
- Martin Rumo
- Mathieu Salzmann
- Matteo Thomas de Giacomi
- Matteo Thomas de Giacomi
- Michael Gerber
- Michel Ganguin
- Michel Yerly
- Mikaël Mayer
- Muhamed Mehmedinovic
- Neha Priyadarshini Garg
- Nicolas Delieutraz
- Panteleimon Zotos
- Pascal Cominoli
- Pascal Cominoli
- Patrick Amstutz
- Pedro Lopez Estepa
- Pierre-Arnaud Guyot
- Rafael Arco Arredondo
- Raphaël Haberer-Proust
- Rico Möckel
- Sacha Contantinescu
- Sandra Wieser
- Sarah Marthe
- Simon Blanchoud
- Simon Capern
- Simon Lépine
- Simon Ruffieux
- Simon Rutishauser
- Stephan Singh
- Stéphane Mojon
- Stéphane Mojon
- Sébastian Gay
- Vlad Trifa
- Yvan Bourquin