
Biorobotics Laboratory BioRob
Modeling of a real quadruped robot using Webots™ simulation platform
Jean-Christophe Fillion-Robin
Semester Project summer 2007
Abstract
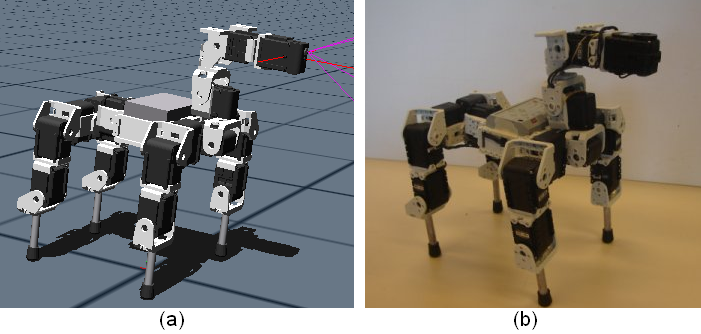
The fundamental achievement of this project was the development of a three-dimensional model (a) that closely resembles the real quadruped robot (b). While the static characteristics of the model were validated against the actual ones of the real robot, the dynamical ones were defined by the results of applying the inverse kinematics model. These were considered best when compared to the ones yielded by the particle swarm optimization (PSO) of central pattern generator (CPG), an alternate method to determine the properties in question. The development of this model will serve as the foundation of a demonstration involving four to six robots playing on a virtual soccer field.
Introduction & Motivation
The modeling of a real robot is a complex and passionating challenge. On the crossing point of mechanics, physics and computer-science, the development of a complete model involves multiple tasks ranging from the 3D modeling of the different body parts, the measure of the different physic properties, the understanding of Webots™ simulator to the development of a central pattern generator or inverse kinematic model allowing the robot to move.
The project was built on the top of two cornerstones: the elaboration of an accurate model both efficient and realistic, and the development of a demo showing the capacities of Webots™ simulator to render a 3D model while simulating the physics.
Multiple component were developed allowing to ease the coding of the model, to validate easily the static characteristics, to distribute the optimization of a central pattern generator on cluster of computers.
Experimental results were gathered leading to clear conclusions. However, a additional test would validate the conclusions even further. There is still a large amount of work to be done and, with the report in hand any master-level engineering student should be able to take the project further. Despite of what is outstanding, the overall satisfaction at this point in time from both, team member and collaborators, is high. [Grade 6/6]
The report aims at describing the Bioloid kit used to build the robot, presenting the Webots™ simulator used to render and simulate the model, and, finally illustrating the different phases of the project.
Documents
Sample videos
Multiple optimization of CPGs by PSO are tried with a variable number of parameters, below are available videos illustrating the outcome of each experiment.
-
PSO - Experiment 1 (AVI, 8.29 MB)
PSO - Experiment 2 (AVI, 8.27 MB)
PSO - Experiment 3 (AVI, 7.34 MB)
PSO - Experiment 4 (AVI, 9.31 MB)
PSO - Experiment 5 (AVI, 5.9 MB)
PSO - Experiment 6 (AVI, 6.60 MB)
Bioloid walking on the soccer playground using a gait based on a reverse kinematic model.
-
Bioloid shooter alone (AVI, 10.5 MB)
Bioloid shooter and keeper (AVI, 4.07 MB)
Bioloid soccer playground battle (AVI, 8.30 MB)
Materials
-
Demo Robocup - Atlanta July 7th, 2007- Webots worlds and controllers (ZIP, 524 KB)
3D models of bioloid parts including OBJ, AOI and VRML files (ZIP, 1.25 MB)
Webots worlds and controllers (ZIP, 517 KB)
Scripts, Webots controllers and worlds, supervisor for PSO distribution (ZIP, 439 KB)
Results of CPG optimization experiments by PSO and required Matlab code for their analysis (ZIP, 79.5 KB)
XFileLoading - Extract body parts (as OBJ files) from an X file - provided by Laurent Lessieux (ZIP, 359 KB)
NUWalk - Four-legged walking gait analyzer - provided by Universlty of Newcastle (ZIP, 106 KB)
Bioloid photos and screenshots (ZIP, 8.56 MB)
Acknowledgments
It is my pleasure to acknowledge all the great people I had the opportunity to meet and/or work with over the last 6 months.
- Prof. Auke Jan Ijspeert, Project supervisor, SNF assistant professor at the EPFL (Swiss Federal Institute of Technology at Lausanne) and head of the Biologically Inspired Robotics Group (BIRG), Switzerland
- Olivier Michel, CEO and founder of Cyberbotics Ltd., Switzerland
- Yvan Bourquin, Software engineer at Cyberbotics Ltd. and at the Swarm-Intelligent Systems Group of EPFL, Switzerland
- Peter Turner, Managing Director of Tribotix Pty Ltd., Australia
- Steve Mitchell, Tribotix Pty Ltd., Australia
- Robin Fisher, University of Newcastle, Australia
- Laurent Lessieux, Robotics specialist and hobbyist, Japan
- Roberto Cardona, for his friendship, his help and his support
- Matteo Thomas de Giacomi and Alessandro Crespi, for their help and ideas
- All student of the BIRG lab, for the great moments we spent together
References
[1] O. Michel, Cyberbotics Ltd - Webots™: professional mobile robot simulation. International Journal of Advanced Robotic Systems (2004) Volume 1 Number 1: pp. 39-42.
[2] S. Russell, Open Dynamic Engine (ODE): open source and high performance library for simulating rigid body dynamics. - http://www.ode.org/
[3] Research projects, game or various tools that are using ODE. - http://www.ode.org/users.html
[4] Atmega128, 128-Kbyte self-programming Flash Program Memory, 4-kbyte SRAM, 4-kbyte EEPROM, 8 Channel 10-bit A/D-converter. JTAG interface for on-chip-debug. - http://www.atmel.com
[5] Bioloid User Guide - Understanding ID, Address and data p27 - http://www.tribotix.info/Downloads/Robotis/Bioloid/Bioloid%20User%27s%20Guide.pdf
[6] A extended Object file format description - http://www.eg-models.de/formats/Format_Obj.html
[7] http://en.wikipedia.org/wiki/Wavefront_Technologies
[8] Text File format of The Persistence of Vision Raytracer, or POV-Ray which is a ray tracing program available for a variety of computer platforms. - http://en.wikipedia.org/wiki/POV-Ray
[9] Art of Illusion, free and open-source java-based modeling and rendering studio - http://aoi.sourceforge.net/
[10] Virtual Reality Modeling Language - http://en.wikipedia.org/wiki/VRML
[11] WebotsTM Nodes Chart - http://www.cyberbotics.com/cdrom/common/doc/webots/reference/section4.1.html
[12] WebotsTM Reference Manual -Physics Node - http://www.cyberbotics.com/cdrom/common/doc/webots/reference/section2.33.html
[13] M. L. Shik, F. V. Severin, G. N. Orlovskii, Control of Walking and Running by Means of Electrical Stimulation of the Mid-Brain. Biophysics, 11:756-765, 1966.
[14] S. Grillner, Neurobiological Bases of Rhythmic Motor Acts in Vertebrates. Science, New Series, Vol. 228, No. 4696 (Apr. 12, 1985), 143-149.
[15] Y. Bourquin, Self-Organization of Locomotion in Modular Robots. MSc Dissertation, p16, p26
[16] J. Kennedy, R. Eberhart, Particle Swarm Optimization. Proceedings of the 1995 IEEE International Conference on Neural Networks, pp. 1942-1948, IEEE Press.
[17] Y. Shi, and R. C. Eberhart, (1998). Parameter selection in particle swarm optimization. In Evolutionary Programming VII: Proc. EP98, New York: Springer-Verlag, pp. 591-600.
[18] A. J. Ijspeert, J.-M. Cabelguen (2003), Gait transition from swimming to walking: investigation of salamander locomotion control using non-linear oscillators. In Proceedings of Adaptive Motion in Animals and Machines, 2003.
[19] A. Pikovsky, M. Rosenblum, and J. Kurths, (2001). Synchronization, a universal concept in nonlinear sciences. Cambridge Nonlinear Sciences Series 12.
[20] S. Mojon, (2004). Using nonlinear oscillators to control the locomotion of a simulated biped robot. Unpublished Diploma Thesis. http://birg.epfl.ch/page44565.html
[21] User manual of Dynamixel Sensor module AX-S1, release of 06-14-2006
[22] User manual of Dynamixel module AX-12, release of 06-14-2006
[23] Microsoft Direct X API - http://en.wikipedia.org/wiki/DirectX
[24] KDE development Environment - http://www.kdevelop.org/
[25] Bioloid QuickStart "Comprehensive Kit" Manual - http://www.tribotix.info/Downloads/Robotis/Bioloid/QuickStart(Comprehensive Kit).pdf
[26] Rotation representation - http://en.wikipedia.org/wiki/Rotation_representation_(mathematics)
[27] WebotsTM Reference Manual - Servo Node - http://www.cyberbotics.com/cdrom/common/doc/webots/reference/section2.37.html
[28] Number of world inhabitants - http://www.worldpopclock.com
[29] P. Turner, Mathematics required for Legged Robotic Motion, rev 1, September 2006
[30] R. M. Alexander, Locomotion of Animals. Glasgow, London, U.K.:Blackie, 1982.
[31] Rules for the Four Legged Robot League - http://www.tzi.de/4legged/pub/Website/Downloads/Rules2007.pdf
- Archived student projects
- Alain Dysli
- Alexandre Tuleu
- Anurag Tripathi
- Ariane Pasquier
- Aïsha Hitz
- Barthélémy von Haller
- Benjamin Fankhauser
- Benoit Rat
- Bertrand Mesot
- Biljana Petreska
- Brian Jimenez
- Christian Lathion
- Christophe Richon
- Cédric Favre
- Daisy Lachat
- Daniel Marbach
- Daniel Marbach
- Elia Palme
- Elmar Dittrich
- Etienne Dysli
- Fabrizio Patuzzo
- Fritz Menzer
- Giorgio Brambilla
- Ivan Kviatkevitch
- Jean-Christophe Fillion-Robin
- Jean-Philippe Egger
- Jennifer Meinen
- Jesse van den Kieboom
- Jocelyne Lotfi
- Julia Jesse
- Julien Gagnet
- Julien Nicolas
- Julien Ruffin
- Jérôme Braure
- Jérôme Guerra
- Jérôme Maye
- Jérôme Maye
- Kevin Drapel & Cyril Jaquier
- Kevin Drapel & Cyril Jaquier
- Loïc Matthey
- Ludovic Righetti
- Lukas Benda
- Lukas Hohl
- Lukas Hohl
- Marc-Antoine Nüssli
- Martin Biehl
- Martin Riess
- Martin Rumo
- Mathieu Salzmann
- Matteo Thomas de Giacomi
- Matteo Thomas de Giacomi
- Michael Gerber
- Michel Ganguin
- Michel Yerly
- Mikaël Mayer
- Muhamed Mehmedinovic
- Neha Priyadarshini Garg
- Nicolas Delieutraz
- Panteleimon Zotos
- Pascal Cominoli
- Pascal Cominoli
- Patrick Amstutz
- Pedro Lopez Estepa
- Pierre-Arnaud Guyot
- Rafael Arco Arredondo
- Raphaël Haberer-Proust
- Rico Möckel
- Sacha Contantinescu
- Sandra Wieser
- Sarah Marthe
- Simon Blanchoud
- Simon Capern
- Simon Lépine
- Simon Ruffieux
- Simon Rutishauser
- Stephan Singh
- Stéphane Mojon
- Stéphane Mojon
- Sébastian Gay
- Vlad Trifa
- Yvan Bourquin