
Biorobotics Laboratory BioRob
Centipede Robot Locomotion
The snake and salamander robot projects developed at Biologically Inspired Robotics Group (BIRG) have been successful projects involving a big amount of people and resources. These projects have helped to understand biological issues and have stimulated the developing of new tools and technologies.
The salamander robot project was born as an evolution of the snake robots Amphibot I and II and was used to demonstrate the underlying mechanisms of the spinal cord in vertebrates locomotion.
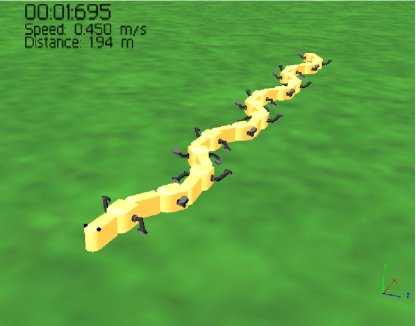
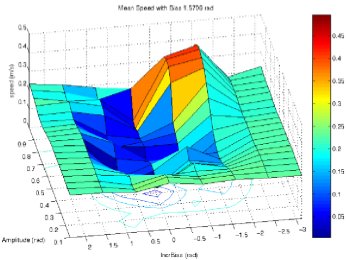
The centipede robot project becomes a logical evolution of the architecture of the robots mentioned before. Incrementing the number of legs and the number of modules should encourage numerous questions as How is locomotion affected when changing architecture parameters? or how is it possible to optimize locomotion with a given architecture? or for example how good is the response of a good locomotion gait on a different terrain?. This project tries to find an answer for these questions.
Movies
-
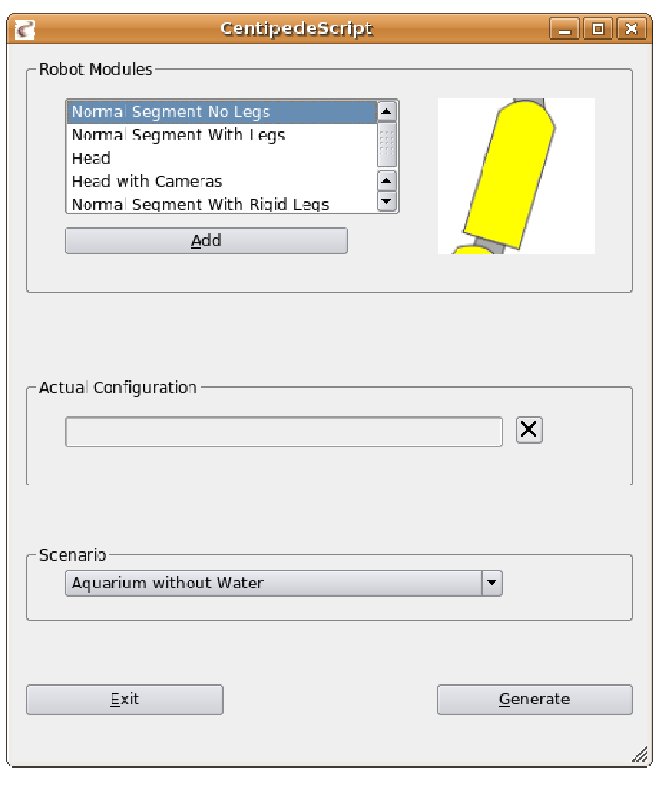
CentipedeScript tool demo (.avi)
- Rigid body controller in a flat terrain scenario (.mpg)
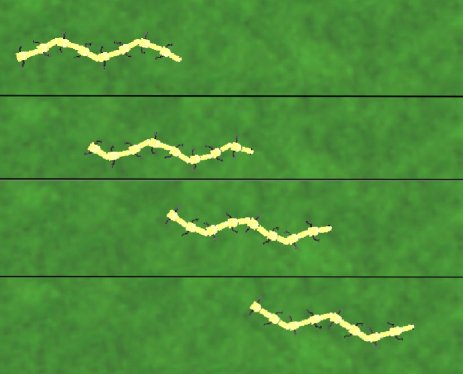
- Oscillatory body controller in a flat terrain scenario (.mpg)
-
Scolopendra heros centipede wandering (.avi)
Report
- Centipede robot locomotion. Final report of this project (.pdf).
- LaTeX project sources (.tgz)
-
Final presentation (.pdf).
Source code
CentipedeScript is the application for fast building new centipede robot models compatibles with Webots. It has been coded in C++ and using Trolltech Qt 3.0 libraries and designed to be cross-platform as well.
{kind=link}
- Archived student projects
- Alain Dysli
- Alexandre Tuleu
- Anurag Tripathi
- Ariane Pasquier
- Aïsha Hitz
- Barthélémy von Haller
- Benjamin Fankhauser
- Benoit Rat
- Bertrand Mesot
- Biljana Petreska
- Brian Jimenez
- Christian Lathion
- Christophe Richon
- Cédric Favre
- Daisy Lachat
- Daniel Marbach
- Daniel Marbach
- Elia Palme
- Elmar Dittrich
- Etienne Dysli
- Fabrizio Patuzzo
- Fritz Menzer
- Giorgio Brambilla
- Ivan Kviatkevitch
- Jean-Christophe Fillion-Robin
- Jean-Philippe Egger
- Jennifer Meinen
- Jesse van den Kieboom
- Jocelyne Lotfi
- Julia Jesse
- Julien Gagnet
- Julien Nicolas
- Julien Ruffin
- Jérôme Braure
- Jérôme Guerra
- Jérôme Maye
- Jérôme Maye
- Kevin Drapel & Cyril Jaquier
- Kevin Drapel & Cyril Jaquier
- Loïc Matthey
- Ludovic Righetti
- Lukas Benda
- Lukas Hohl
- Lukas Hohl
- Marc-Antoine Nüssli
- Martin Biehl
- Martin Riess
- Martin Rumo
- Mathieu Salzmann
- Matteo Thomas de Giacomi
- Matteo Thomas de Giacomi
- Michael Gerber
- Michel Ganguin
- Michel Yerly
- Mikaël Mayer
- Muhamed Mehmedinovic
- Neha Priyadarshini Garg
- Nicolas Delieutraz
- Panteleimon Zotos
- Pascal Cominoli
- Pascal Cominoli
- Patrick Amstutz
- Pedro Lopez Estepa
- Pierre-Arnaud Guyot
- Rafael Arco Arredondo
- Raphaël Haberer-Proust
- Rico Möckel
- Sacha Contantinescu
- Sandra Wieser
- Sarah Marthe
- Simon Blanchoud
- Simon Capern
- Simon Lépine
- Simon Ruffieux
- Simon Rutishauser
- Stephan Singh
- Stéphane Mojon
- Stéphane Mojon
- Sébastian Gay
- Vlad Trifa
- Yvan Bourquin